Почему и что делать, если квадрокоптер при взлете тянет в одну сторону

С проблемой, когда квадрокоптер тянет в сторону, можно столкнуться при испытании нового дрона или очередном запуске старого. Обычно неполадка легко поддается исправлению без обращения в сервисный центр.
Почему квадрокоптер тянет в сторону
Ситуация, в которой квадрокоптер кренит набок или не взлетает, очень распространенная проблема. Вызывают неполадку несколько причин:
Еще одна причина, по которой квадрокоптер может тянуть в сторону, это ошибка при самостоятельной замене винта. Хрупкие пропеллеры часто ломаются, для устранения поломки необязательно обращаться к профессионалам — детали стоят дешево и не являются дефицитом. Однако многие пользователи в процессе ремонта подбирают неправильный винт с вращением в обратную сторону. Соответственно, в процессе полета один из пропеллеров толкает воздух не в том направлении, и дрон начинает тянуть вбок.
 Дрон может тянуть в сторону по причине малозаметной трещины на винте и разбалансировки конструкции
Дрон может тянуть в сторону по причине малозаметной трещины на винте и разбалансировки конструкции
Что делать и как исправить, если квадрокоптер при взлете тянет в сторону
Если при испытании выяснилось, что дрон тянет в сторону, и летит он неровно, необходимо посадить устройство на землю и провести внимательный физический осмотр. Пошаговый алгоритм предлагается следующий:
Совет! Если винты дрона недавно приходилось менять, следует еще раз проверить направление вращения купленных пропеллеров и при необходимости переустановить их повторно.
Как провести триммирование для квадрокоптера
Если квадрокоптер летит в бок, делать нужно в первую очередь проверку его механической исправности. Но когда отладка винтов не дает результатов, и дрон продолжает тянуть в сторону, остается провести автоматическую калибровку устройства. Выполняют ее по такой схеме:
Если новый квадрокоптер заваливается в сторону при взлете, для начала можно попробовать просто сбросить заводские установки и провести калибровку гироскопа и акселерометра. Для этого аппарат размещают на ровной поверхности, включают и отводят оба стика сначала вниз и влево, а затем вниз и вправо. Об успешно выполненной настройке коптер сообщит светодиодным или звуковым сигналом.
 Триммеры на пульте дрона обычно расположены возле правого стика
Триммеры на пульте дрона обычно расположены возле правого стика
Заключение
Неполадка, когда квадрокоптер тянет в сторону, встречается очень часто, но обычно не свидетельствует о серьезной неисправности. В большинстве случаев крен устраняется калибровкой или механической чисткой аппарата.
Переворачивается квадрокоптер – что делать и как исправить?

Что делать, если переворачивается квадрокоптер? Вы собрали и включили квадрокоптер, приготовились взлетать, но вместо взлета дрон перевернулся. Что делать в таком случае? В этой статье попытаемся помочь вам решить эту проблему.
В новой (последней) версии Betaflight добавлена новая функция — полетный контроллер будет запрещать взлет, если имеются какие-либо неполадки, которые он заметит, будто неоткалиброванный гироскоп или неисправный регулятор оборотов. Это очень крутая функция, которая обезопасит пилота и окружающих от возможных травм или другого ущерба. Если контроллер решит, что что-то не так, он не даст квадрокоптеру взлететь и на экране OSD появится надпись RUNAWAY. Все шаги по поиску проблемы и ее исправления одинаковы и будут описаны ниже.
Не важно, первый это у вас квадрокоптер или десятый — вы должны знать, что перед любыми проверками нового квадрокоптера проверять его следует без пропеллеров и уж тем более ремонтировать тоже без них!
Проверьте пропеллеры
Правильно ли установлены пропеллеры? Квадрокоптер — это рама и 4 двигателя, от слова КВАДРО. Для правильного полета 2 двигателя должны крутиться по часовой стрелке и 2 против часовой.
Убедитесь, что пропеллеры установлены в соответствии с этой схемой:
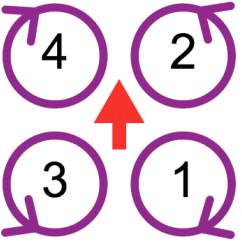
Для удобного восприятия — просто запомните, что двигатели крутятся «внутрь» дрона.
Обычно на пропеллерах указывается, где у него верх, а где низ, но если нет, то верхняя его кромка должна «цепляться» за воздух и толкать его вниз:
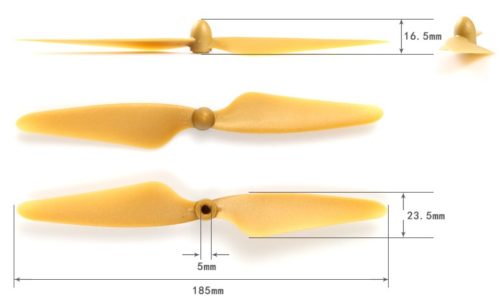
На изображении выше хорошо видно кромку лопасти, которая будет цепляться за воздух.
Проверьте Turtle Mode
Turtle Mode — это режим черепахи. Работает он так: ваш дрон упал вверх ногами, вы включаете Turtle Mode и дрон включает двигатели в обратную сторону и переворачивает себя на «ноги». Выглядит это вот так:

Вам нужно убедиться, что вы случайно или преднамеренно не назначили одному и тому же переключателю две функции, например, арминг и черепаху на один переключатель. Для этого запустите Betaflight и перейдите в раздел Режимы (Modes).
Проверьте направление вращения двигателей
Перед этой проверкой снимите пропеллеры!
Если у вас переворачивается квадрокоптер, откройте Betaflight и подключите аккумулятор к дрону, затем перейдите во вкладку Motors и проверьте направление каждого двигателя в соответствии со схемой. На глаз вы навряд ли сможете определить направление, так как мотор будет слишком быстро крутиться даже на малых оборотах, поэтому используйте палец. Слегка дотроньтесь до мотора и вы поймете, в какую сторону он крутится.
Если по схеме выяснилось, что мотор крутится не в ту сторону, есть два способа это исправить:
Про перепаять — меняем местами плюс и минус, а с реверсом, читаем статью: https://profpv.ru/blheli-конфигуратор-для-прошивки-регулято/
Проверьте направление полетного контроллера
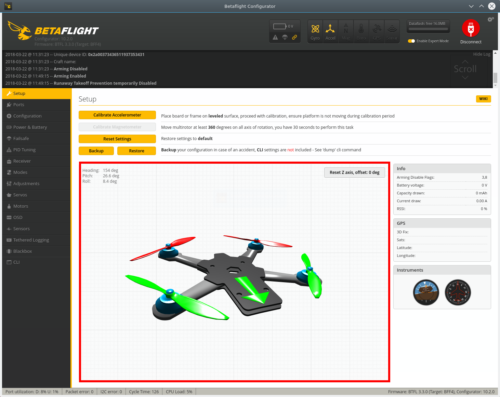
Снова зайдите в Betaflight во вкладку Setup, там будет 3D-модель вашего дрона. Возьмите его в руки и подвигайте, модель должна четко повторять ваши действия. Если вы наклоняете вперед, а моделька наклоняется вправо, то вам нужно скорректировать направление. Для этого перейдите во вкладку Configuration и найдите поле Board and Sensor Alignment. В поле вводятся градусы. Для определения того, сколько градусов прописать, воспользуйтесь транспортиром, ну или на глаз — к примеру, начните с 90°.
Откалибруйте акселерометр
Также нужно откалибровать акселерометр. Перейдите во вкладку Setup, там будет кнопка Calibrate. Установите дрон на ровную поверхность и нажмите кнопку. Возможно, датчик был не откалиброван и обманывал полетный контроллер, и последний пытался это исправить.
Проверьте схему двигателей (mixer)
Во вкладке Setup будет блок для выбора схемы двигателей. Если у вас 4 двигателя, то должна быть выбрана схема Quad X.
Обновите прошивку
В решении проблемы может помочь перепрошивка полетного контроллера и регуляторов оборотов. Для этого нужно сначала сделать бекап настроек. Бекап — это резервная копия. Как сделать бекап через CLI: https://profpv.ru/как-сделать-бекап-настроек-и-восстано/
Механические проблемы
Если ваш квадрокоптер до этой проблемы летал нормально, то, скорее всего, дело в механическом повреждении одного из компонентов. Это также может привести к вопросу, почему переворачивается квадрокоптер.
Моторы и регуляторы оборотов
На двигателе могут отвалиться магниты, вал, может рассыпаться подшипник или оплавиться эмаль на обмотке. Все это выводит из строя двигатель. Из-за магнита и подшипника заклинет, из-за вала может вылететь колокол или зацепится магнит — тоже заклинет. А оплавленная эмаль вызовет короткое замыкание — мотор сгорит.

От перегрева, а также от механических ударов могут выйти из строя регуляторы оборотов, так как это довольно сложная электроника, основанная на «ключах», и выход из строя одного из компонентов регулятора нарушит работу всей платы, а та в свою очередь — работу двигателя.
Неисправный акселерометр
Если после калибровки акселерометра нет никакого эффекта и модель квадрокоптера по-прежнему не понимает, в каком она положении — у вас проблемы с датчиком, его нужно либо поменять (если вам повезло и вы специалист по ремонту электроники), либо заменить полетный контроллер. Но перед этим попробуйте сначала его отключить во вкладке Configuration. Вы, конечно, не сможете летать в режиме стабилизации, но опытные пилоты в нем и не летают, только в АКРО.
Неисправный гироскоп
Если во вкладке Setup моделька постоянно крутится и ведет себя неадекватно, то есть проблемы с гироскопом. Для проверки попробуйте отсоединить питание и снова включить — после каждого включения гироскоп проходит калибровку. Если это не помогло, то выход только в замене полетного контроллера.
Настройка и калибровка квадрокоптера
Подавляющее большинство (до 90%) квадрокоптеров продаются уже в готовом к полету состоянии (подтверждением становится специальная маркировка Ready to Fly). Одновременно перед первым запуском владельцу при необходимости нужно провести калибровку. Для этого поднимите ваш квадрокоптер попробуйте двигать в разные стороны. Если траектория движения будет меняться хаотично, то это признак необходимости калибровки. Аналогичные проверки стоит делать периодически и в будущем (особенно это касается ударов дрона о разные поверхности), что может сбить настройку и точность движения. Контролировать четкость реакции на ваши действия необходимо на высоте чуть выше полуметра. Сильно поднимать рискованно из-за повреждений при падении, а на высоте до 50 сантиметров пропеллеры квадрокоптера будут создавать воздушную подушку, которая удержит дрон и не позволит четко проконтролировать его действия в вертикальной плоскости.
Обратим внимание, что проверку необходимо производить в большом закрытом помещении (подойдет спортивный зал или склад), либо на поляне, в поле при условии отсутствия ветра, который может внести свои коррективы и сносить дрон в одну из сторон.
Подготовка коптера к первому взлету
Перед первым запуском проверьте включен ли дрон, проконтролировав положение соответствующего переключателя на его корпусе. Затем установите его на горизонтальную поверхности и разово на короткий промежуток времени поднимите левый джойстик вверх (если требование горизонтальности не будет соблюдено, то могут быть сбиты все настройки). Если все в порядке и можно взлетать, то вы услышите короткий однотонный звук.
В случае, когда после активации на пульте управления начал быстро мигать светодиодный индикатора, а на квадрокоптере он мигает очень медленно, то это признак рассинхронизации.
Восстановить нормальную связь поможет выключение и повторное включение дрона.
Калибровка квадртокоптера. Основные моменты
Существует два варианта действий:
Сама калибровка проводится следующим образом:
Если появились проблемы, то сбрасываем до нуля настройки. Для этого поставьте дрон на ровную горизонтальную площадку, включите его и потяните одновременно левый джойстик вниз, а правый налево. Сделайте паузу, необходимую для настройки гироскопа, а затем одновременно левый стик отведите вниз, а правый направо. дождавшись калибровки акселерометра. Обратим внимание, что калибровка невозможна на наклонной поверхности из-за неизбежных ошибок и необходимости повторно калибровать.
Теперь попробуйте вновь запустить дрон и поднять его на высоту не меньше полуметра (ниже нет смысла, так как коптер будет удерживаться воздушной подушкой, образующейся при вращении винтов). Если проблема не исчезла, то требуется триммирование.
Триммирование квадрокоптера
Достаточно простой процесс, позволяющий точно откалибровать движения дрона и обеспечить хорошую управляемость в полете. При выполнении процесса обращайте внимание на следующие правила:
Для оценки направления, требующего настройки, достаточно сделать разворот квадрокоптера на 360 градусов по любому из основных направлений. Для этого достаточно потянут правый стик в одну из сторон и нажать верхнюю кнопку.

Перед тем как начать триммирование квадрокоптера нужно помнить, что у современных дронов имеется два режима работы (высокий и низкий расходы энергии), поэтому важно оценить качество его работы в каждом из них по отдельности. Также обратите внимание на правильность сборки самого коптера, так как иногда пропеллеры не крутятся даже при полностью исправных моторах.
Как калибровать квадрокоптер Syma
Принципиально триммирование и настройка подобных дронов не отличается от описанной выше процедуры. Ее можно легко провести собственными силами с помощью инструкции, прилагаемой к коптеру. Также обратим внимание, что модели Syma оснащены устройством, контролирующим уровень заряда аккумулятора. При приближении последнего к критическому уровню дрон самостоятельно снижается до безопасной высоты, что предупредит его повреждение при полной разрядке и падении на землю. Про этот момент нужно обязательно помнить и если не удается произвести настройку квадрокоптера, то обратите внимание на уровень заряда.

Сам процесс калибровки и триммирования не отличается от моделей других производителей. Для начала нужно запустить дрон на высоту чуть выше полуметра и понаблюдать за ним. Если происходит самопроизвольное смещение, то нужно подкорректировать, учитывая следующие моменты:
Обратите внимание, что передвигать триммер нужно очень медленно из-за риска перестараться и необходимости откалибровать его уже в обратном направлении.
Почему квадрокоптер тянет в сторону?
Самой распространенной проблемой с дронами остается их нестабильное положение и «увод» в сторону в условиях безветренной погоды. В большинстве случаев проблема решает калибровка и триммирование. Если это не помогает, то проблема может быть более серьезной и нужно проверить следующие моменты:
Достаточно часто причиной проблем становится попытка самостоятельного или неквалифицированного ремонта, что нужно учитывать при техническом обслуживании. Если вы решите калибровать или ремонтировать дрон самостоятельно, то действуйте внимательно и соблюдайте требования инструкций.
Что делать если квадрокоптер тянет в сторону
Подавляющее большинство (до 90%) квадрокоптеров продаются уже в готовом к полету состоянии (подтверждением становится специальная маркировка Ready to Fly). Одновременно перед первым запуском владельцу при необходимости нужно провести калибровку. Для этого поднимите ваш квадрокоптер попробуйте двигать в разные стороны. Если траектория движения будет меняться хаотично, то это признак необходимости калибровки. Аналогичные проверки стоит делать периодически и в будущем (особенно это касается ударов дрона о разные поверхности), что может сбить настройку и точность движения. Контролировать четкость реакции на ваши действия необходимо на высоте чуть выше полуметра. Сильно поднимать рискованно из-за повреждений при падении, а на высоте до 50 сантиметров пропеллеры квадрокоптера будут создавать воздушную подушку, которая удержит дрон и не позволит четко проконтролировать его действия в вертикальной плоскости.
Обратим внимание, что проверку необходимо производить в большом закрытом помещении (подойдет спортивный зал или склад), либо на поляне, в поле при условии отсутствия ветра, который может внести свои коррективы и сносить дрон в одну из сторон.
Подготовка коптера к первому взлету
Перед первым запуском проверьте включен ли дрон, проконтролировав положение соответствующего переключателя на его корпусе. Затем установите его на горизонтальную поверхности и разово на короткий промежуток времени поднимите левый джойстик вверх (если требование горизонтальности не будет соблюдено, то могут быть сбиты все настройки). Если все в порядке и можно взлетать, то вы услышите короткий однотонный звук.
В случае, когда после активации на пульте управления начал быстро мигать светодиодный индикатора, а на квадрокоптере он мигает очень медленно, то это признак рассинхронизации.
Восстановить нормальную связь поможет выключение и повторное включение дрона.
Калибровка квадртокоптера. Основные моменты
Существует два варианта действий:
Сама калибровка проводится следующим образом:
Если появились проблемы, то сбрасываем до нуля настройки. Для этого поставьте дрон на ровную горизонтальную площадку, включите его и потяните одновременно левый джойстик вниз, а правый налево. Сделайте паузу, необходимую для настройки гироскопа, а затем одновременно левый стик отведите вниз, а правый направо. дождавшись калибровки акселерометра. Обратим внимание, что калибровка невозможна на наклонной поверхности из-за неизбежных ошибок и необходимости повторно калибровать.
Теперь попробуйте вновь запустить дрон и поднять его на высоту не меньше полуметра (ниже нет смысла, так как коптер будет удерживаться воздушной подушкой, образующейся при вращении винтов). Если проблема не исчезла, то требуется триммирование.
Триммирование квадрокоптера
Достаточно простой процесс, позволяющий точно откалибровать движения дрона и обеспечить хорошую управляемость в полете. При выполнении процесса обращайте внимание на следующие правила:
Для оценки направления, требующего настройки, достаточно сделать разворот квадрокоптера на 360 градусов по любому из основных направлений. Для этого достаточно потянут правый стик в одну из сторон и нажать верхнюю кнопку.
Перед тем как начать триммирование квадрокоптера нужно помнить, что у современных дронов имеется два режима работы (высокий и низкий расходы энергии), поэтому важно оценить качество его работы в каждом из них по отдельности. Также обратите внимание на правильность сборки самого коптера, так как иногда пропеллеры не крутятся даже при полностью исправных моторах.
Как калибровать квадрокоптер Syma
Принципиально триммирование и настройка подобных дронов не отличается от описанной выше процедуры. Ее можно легко провести собственными силами с помощью инструкции, прилагаемой к коптеру. Также обратим внимание, что модели Syma оснащены устройством, контролирующим уровень заряда аккумулятора. При приближении последнего к критическому уровню дрон самостоятельно снижается до безопасной высоты, что предупредит его повреждение при полной разрядке и падении на землю. Про этот момент нужно обязательно помнить и если не удается произвести настройку квадрокоптера, то обратите внимание на уровень заряда.
Сам процесс калибровки и триммирования не отличается от моделей других производителей. Для начала нужно запустить дрон на высоту чуть выше полуметра и понаблюдать за ним. Если происходит самопроизвольное смещение, то нужно подкорректировать, учитывая следующие моменты:
Обратите внимание, что передвигать триммер нужно очень медленно из-за риска перестараться и необходимости откалибровать его уже в обратном направлении.
Почему квадрокоптер тянет в сторону?
Самой распространенной проблемой с дронами остается их нестабильное положение и «увод» в сторону в условиях безветренной погоды. В большинстве случаев проблема решает калибровка и триммирование. Если это не помогает, то проблема может быть более серьезной и нужно проверить следующие моменты:
Достаточно часто причиной проблем становится попытка самостоятельного или неквалифицированного ремонта, что нужно учитывать при техническом обслуживании. Если вы решите калибровать или ремонтировать дрон самостоятельно, то действуйте внимательно и соблюдайте требования инструкций.

Доброго времени суток, наши уважаемые читатели. Даже самый совершенный и безотказный механизм со временем изнашивается и ломается. Не являются исключением и беспилотники. Чаще всего поломки не являются фатальными, многие из них вполне по силам исправить самостоятельно, не прибегая к помощи специалистов. В этой статье мы поговорим о том, почему квадрокоптер не взлетает и с какими типичными неисправностями сталкиваются владельцы БПЛА.
Базовые принципы полета квадрокоптера
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.

И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Каждый квадрокоптер оснащен четырьмя винтами (квадро — четыре) постоянного шага. Под каждым винтом установлен небольшой двигатель коллекторного или бесколлекторного типа. Два винта совершают вращение против часовой стрелки, и два – по часовой.
Управление движением происходит следующим образом:
Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
Основные неполадки квадрокоптеров и способы их устранения
В отличие от самолетов или вертолетов, любительские квадры не только проще в управлении, но и зачастую проще в ремонте. Более того, в некоторых ситуациях ремонт вовсе не нужен.

Конечно, охватить все существующие неполадки квадрокоптеров вряд ли возможно. Все модели разные, и, хотя их и объединяют общие принципы работы, однако электронная начинка, интеллектуальные режимы, настройки управления отличаются порой кардинально. Но можно дать некоторые общие рекомендации. Например, подсказать, как правильно должны крутиться винты, для чего необходима калибровка гироскопа, на что обратить внимание, если движки работают рывками или не работают вовсе.
Воздушные винты вращаются, но дрон не взлетает
Типичная проблема, с которой сталкиваются новички – коптер не взлетает, хотя винты исправно вращаются на увеличенной мощности. Скорее всего, дело в неправильно установленных пропеллерах.

Понять, как правильно установить винты на квадрокоптер, очень легко. Проверьте маркировку, нанесенную на них, а также маркировку на лучах. Они должны совпадать. Скорее всего, пропеллер, который должен вращаться по часовой, был поставлен на двигатель, вращающийся против часовой стрелки (или наоборот).
В результате, направление вращения винтов оказалось неверным. Из-за этого дрон не способен взлететь. Прежде чем что-то разбирать или относить коптер в ремонт, еще раз проверьте правильность установки винтов.
Не вращается один или несколько двигателей
Более сложной, но не безнадежной, является ситуация, в которой при запуске беспилотника один или несколько моторов не включаются. Обычно такая ситуация характерна для коллекторных двигателей, не отличающихся высокой надежностью.

Впрочем, может быть дело не в движке, а в банальном обрыве провода или в плохом контакте. Провода нередко рвутся после неудачных приземлений, тогда как контакты могут окислиться под воздействием влаги.
Внимательно осмотрите неработающий двигатель и провод, идущий к нему. Если визуально неисправности не обнаружены, можно прозвонить электроцепь движка. Если и прозвон ничего не дал, тогда нужно проверять сам электродвигатель. Возможно, имело место короткое замыкание, либо же обрыв случился внутри корпуса. Сгоревший двигатель иногда можно опознать визуально.
В случае с бесколлекторными двигателями поломка может объясняться неисправностью электроники. Если не запускается бесколлекторный движок, то, скорее всего, из строя вышел электронный регулятор скорости (ESC). Подключите к исправному мотору тот ESC, который необходимо проверить. Повторение проблемы укажет на неисправность регулятора. Если же движок заработал, то проверять придется электронный контроллер. Может потребоваться сервисное обслуживание.
Посторонние шумы при запуске двигателей
Появление посторонних шумов при запуске движков может являться признаком неисправности. Вполне может быть, что шумы генерируются не самими моторами, а погнутыми или деформированными винтами. Проблема легко решается осмотром и ремонтом пропеллеров, либо же их заменой.

Поставьте коптер на ровную поверхность и внимательно присмотритесь к пропеллерам. Если один или несколько винтов являются выпуклыми, скорее всего, именно они являются источником шума. Искривление поверхности пропеллера приводит к уменьшению подъемной тяги, ведь скорость винта снижается. Балансировка пропеллеров позволит убрать или значительно уменьшить уровень шума. Впрочем, пропеллеры являются расходниками, и их проще всего заменить.
Хуже, если шум издают двигатели. Это может говорить о том, что поломка скрыта внутри корпуса мотора. В таком случае ремонт квадрокоптера будет заключаться в проверке и замене движков.
Квадрокоптер не реагирует на пульт
Отсутствие реакции на команды зачастую объясняется тем, что в пульте дистанционного управления сели батарейки или разрядился аккумулятор.

Если сигнальный индикатор на аппаратуре не загорается, то с высокой долей вероятности все дело в севших батарейках. Соответственно, никакой ремонт проводить не нужно. Достаточно вставить свежие элементы питания.
Бывает и так, что пилот неверно выполняет последовательность действий, соединяя коптер с пультом. В инструкции обычно подробно расписываются шаги, которые необходимо совершить, чтобы инициализировать беспилотник. Иногда причиной отсутствия реакции на команды является неверное положение дрона (аппарат перевернут или лежит на боку). Некоторые модели дронов не реагируют на пульт до тех пор, пока не будут установлены на горизонтальную плоскость.
Если замена батареек и правильно проведенная процедура инициализации ничего не дали, то проблему следует искать в проводах и контактах, иными словами, внутри пульта. Возможно, все дело в окислившихся батарейках. В таком случае нужно их заменить и протереть контакты.
Деформация лучей
Деформацию лучей заметить довольно просто. Обычно лучи повреждаются в результате жестких падений или после столкновений с препятствиями в полете. То есть это в любом случае нештатные ситуации.
Дроны бюджетного уровня с деформированными лучами нередко становятся неремонтопригодными. Проще приобрести новый коптер, чем пытаться восстановить луч. Что касается дорогих моделей, то для них даже серьезное повреждение лучей не всегда является фатальным. Почти всегда можно приобрести запчасти (в том числе и лучи) и выполнить ремонт.
Квадрокоптер летает нестабильно
Распространена ситуация, когда после взлета дрон кренит бок, ведет себя в полете нестабильно, не держит заданную точку, отклоняется от курса, без видимой причины заваливается. Скорее всего, дело не в дефектах электроники как таковой, а в ненастроенных или неверно настроенных гироскопе и акселерометре. Необходимо выполнить повторную настройку, следуя инструкции. Из-за неправильной настройки система стабилизации работает с ошибками.
Если же после повторной калибровки коптер все равно кренит бок, но уже не так сильно, то следует задействовать триммеры на пульте. Они помогут выровнять летательный аппарат. Неправильная настройка гироскопа и игнорирование пилотом триммеров являются распространенными ошибками.
Дрон не четко летает в интеллектуальных режимах
Интеллектуальные режимы полета с использованием GPS данных могут неверно работать в случае, если коптер установил связь с малым количеством спутников. К примеру, в помещениях GPS сигнал зачастую полностью отсутствует. На открытом пространстве причиной того, что электроника не способна найти достаточное количество спутников, является плохая погода и значительная облачность. Все, что остается сделать, это дождаться хороших погодных условий. В противном случае, вы рискуете повредить коптер. Он может неожиданно перевернуться, потерять обороты, врезаться.
Еще одной причиной может быть повреждение антенны GPS модуля. Впрочем, такой тип неисправности встречается редко.
Дрон не выполняет фигуры высшего пилотажа
Фигуры высшего пилотажа обычно недоступны в обучающих режимах, режимах для новичков. Как правило, необходимо перейти в режим для профессиональных пилотов, в котором отключаются все полетные ограничения и деактивируются такие функции, как автопилот. В инструкциях подробно расписывается, какие функции и ограничения действуют для доступных режимов.
На этом пока все, не забывайте подписываться на наши статьи и делиться полезными материалами в соцсетях. До новых встреч.
Подавляющее большинство (до 90%) квадрокоптеров продаются уже в готовом к полету состоянии (подтверждением становится специальная маркировка Ready to Fly). Одновременно перед первым запуском владельцу при необходимости нужно провести калибровку. Для этого поднимите ваш квадрокоптер попробуйте двигать в разные стороны. Если траектория движения будет меняться хаотично, то это признак необходимости калибровки. Аналогичные проверки стоит делать периодически и в будущем (особенно это касается ударов дрона о разные поверхности), что может сбить настройку и точность движения. Контролировать четкость реакции на ваши действия необходимо на высоте чуть выше полуметра. Сильно поднимать рискованно из-за повреждений при падении, а на высоте до 50 сантиметров пропеллеры квадрокоптера будут создавать воздушную подушку, которая удержит дрон и не позволит четко проконтролировать его действия в вертикальной плоскости.
Обратим внимание, что проверку необходимо производить в большом закрытом помещении (подойдет спортивный зал или склад), либо на поляне, в поле при условии отсутствия ветра, который может внести свои коррективы и сносить дрон в одну из сторон.
Подготовка коптера к первому взлету
Перед первым запуском проверьте включен ли дрон, проконтролировав положение соответствующего переключателя на его корпусе. Затем установите его на горизонтальную поверхности и разово на короткий промежуток времени поднимите левый джойстик вверх (если требование горизонтальности не будет соблюдено, то могут быть сбиты все настройки). Если все в порядке и можно взлетать, то вы услышите короткий однотонный звук.
В случае, когда после активации на пульте управления начал быстро мигать светодиодный индикатора, а на квадрокоптере он мигает очень медленно, то это признак рассинхронизации.
Восстановить нормальную связь поможет выключение и повторное включение дрона.
Калибровка квадртокоптера. Основные моменты
Существует два варианта действий:
Сама калибровка проводится следующим образом:
Если появились проблемы, то сбрасываем до нуля настройки. Для этого поставьте дрон на ровную горизонтальную площадку, включите его и потяните одновременно левый джойстик вниз, а правый налево. Сделайте паузу, необходимую для настройки гироскопа, а затем одновременно левый стик отведите вниз, а правый направо. дождавшись калибровки акселерометра. Обратим внимание, что калибровка невозможна на наклонной поверхности из-за неизбежных ошибок и необходимости повторно калибровать.
Теперь попробуйте вновь запустить дрон и поднять его на высоту не меньше полуметра (ниже нет смысла, так как коптер будет удерживаться воздушной подушкой, образующейся при вращении винтов). Если проблема не исчезла, то требуется триммирование.
Триммирование квадрокоптера
Достаточно простой процесс, позволяющий точно откалибровать движения дрона и обеспечить хорошую управляемость в полете. При выполнении процесса обращайте внимание на следующие правила:
Для оценки направления, требующего настройки, достаточно сделать разворот квадрокоптера на 360 градусов по любому из основных направлений. Для этого достаточно потянут правый стик в одну из сторон и нажать верхнюю кнопку.
Перед тем как начать триммирование квадрокоптера нужно помнить, что у современных дронов имеется два режима работы (высокий и низкий расходы энергии), поэтому важно оценить качество его работы в каждом из них по отдельности. Также обратите внимание на правильность сборки самого коптера, так как иногда пропеллеры не крутятся даже при полностью исправных моторах.
Как калибровать квадрокоптер Syma
Принципиально триммирование и настройка подобных дронов не отличается от описанной выше процедуры. Ее можно легко провести собственными силами с помощью инструкции, прилагаемой к коптеру. Также обратим внимание, что модели Syma оснащены устройством, контролирующим уровень заряда аккумулятора. При приближении последнего к критическому уровню дрон самостоятельно снижается до безопасной высоты, что предупредит его повреждение при полной разрядке и падении на землю. Про этот момент нужно обязательно помнить и если не удается произвести настройку квадрокоптера, то обратите внимание на уровень заряда.
Сам процесс калибровки и триммирования не отличается от моделей других производителей. Для начала нужно запустить дрон на высоту чуть выше полуметра и понаблюдать за ним. Если происходит самопроизвольное смещение, то нужно подкорректировать, учитывая следующие моменты:
Обратите внимание, что передвигать триммер нужно очень медленно из-за риска перестараться и необходимости откалибровать его уже в обратном направлении.
Почему квадрокоптер тянет в сторону?
Самой распространенной проблемой с дронами остается их нестабильное положение и «увод» в сторону в условиях безветренной погоды. В большинстве случаев проблема решает калибровка и триммирование. Если это не помогает, то проблема может быть более серьезной и нужно проверить следующие моменты:
Достаточно часто причиной проблем становится попытка самостоятельного или неквалифицированного ремонта, что нужно учитывать при техническом обслуживании. Если вы решите калибровать или ремонтировать дрон самостоятельно, то действуйте внимательно и соблюдайте требования инструкций.



