Автомат Мили


См. также
Литература

Полезное
Смотреть что такое «Автомат Мили» в других словарях:
автомат Мили — — [http://www.iks media.ru/glossary/index.html?glossid=2400324] Тематики электросвязь, основные понятия EN Mealy machine … Справочник технического переводчика
автомат Мили — Mealy o automatas statusas T sritis automatika atitikmenys: angl. Mealy automaton vok. Mealy Automat, m rus. автомат Мили, m pranc. automate Mealy, m ryšiai: sinonimas – Milio automatas … Automatikos terminų žodynas
Автомат Мура — (автомат второго рода) в теории вычислений конечный автомат, выходное значение сигнала в котором зависит лишь от текущего состояния данного автомата, и не зависит напрямую, в отличие от автомата Мили, от входных значений. Автомат Мура назван … Википедия
АВТОМАТ КОНЕЧНЫЙ — математическая модель устройства с конечной памятью, преобразующего дискретную информацию. А. к. является одним из важнейших видов управляющих сиcтем. Содержательно А. к. можно охарактеризовать как устройство, имеющее входной и выходной каналы и… … Математическая энциклопедия
Классификация абстрактных автоматов — Содержание 1 Классификация автоматов по логическим свойствам функций переходов и выходов 1.1 … Википедия
ПРОГРАММИРОВАНИЕ ТЕОРЕТИЧЕСКОЕ — математическая дисциплина, изучающая математич. абстракции программ, трактуемых как объекты, выраженные на формальном языке, обладающие определенной информационной и логич. структурой и подлежащие исполнению на автоматич. устройствах. П. т.… … Математическая энциклопедия
JFLAP — JFLAP кросплатформенная программа для экспериментов с различными объектами встречающихся при изучении формальных языков. Разрабатывается Университетом Дьюка под Creative Commons Attribution NonCommercial ShareAlike 2.5 License. Возможности… … Википедия
Схема ускоренного переноса — Необходимо проверить качество перевода и привести статью в соответствие со стилистическими правилами Википедии. Вы можете помочь … Википедия
Mealy Automat — Mealy o automatas statusas T sritis automatika atitikmenys: angl. Mealy automaton vok. Mealy Automat, m rus. автомат Мили, m pranc. automate Mealy, m ryšiai: sinonimas – Milio automatas … Automatikos terminų žodynas
Mealy automaton — Mealy o automatas statusas T sritis automatika atitikmenys: angl. Mealy automaton vok. Mealy Automat, m rus. автомат Мили, m pranc. automate Mealy, m ryšiai: sinonimas – Milio automatas … Automatikos terminų žodynas
Функционирование и синтез цифровых устройств. Часть 3
Управляющие автоматы. Принцип микропрограммного управления
Введение
Любое устройство можно структурно разделить на управляющую часть и исполнительную. Управляющая часть (управляющий автомат, УА) отвечает за взаимодействие с внешней средой, а исполнительная (операционный автомат, ОА) – за выполнение каких-то действий.
На примере простой ёлочной гирлянды – лампочки – исполнительная часть, а микросхему, которая ими управляет – управляющая.
В простейшем случае, УА может представлять собой соединённые последовательно генератор низкой частоты (0.5-2 Гц), двоичный счётчик и дешифратор – рис. 1.
Рис. 1. Простейший УА
В этом случае, на выходе дешифратора будет появляться бегущая единица. Можно также подключить лампы непосредственно к выходам счётчика и т.д.
Из схемы понятны аспекты работы этого УУ:
Недостатки тоже очевидны:
1. Невозможность какого-либо внешнего управления работой УУ. Управлять можно только частотой генератора и параметрами импульсов (если взять генератор «получше»). Алгоритмы работы счётчика и дешифратора вообще жёстко фиксированы, т.к. это стандартные узлы со стандартным «поведением» и т.д.
2. Если мы захотим включать лампочки как-то иначе, например в порядке 0, 2, 1, 3, (или вообще «на лету» менять каким-либо образом эту очерёдность) либо включать их парами (например, 0-1, 2-3), то окажется, что этого в принципе сделать нельзя, т.к. счётчик/дешифратор или какие-то другие стандартные элементы «не умеют» так работать.
Для преодоления этих недостатков разрабатывают специальные УА.
Раздел 1. Управляющие автоматы с жёсткой логикой
Теория управляющих абстрактных и конечных автоматов – очень обширная наука, описывающая понятие автоматов, их поведение, формализацию, различные модели и пр. Здесь не будут рассматриваться все эти теоретические аспекты, рассмотрим лишь две практических варианта УА с жёсткой логикой.
Название «автомат с жёсткой логикой» проистекает из того, что алгоритм функционирования такого автомата жёстко задан его схемой. Для внесения даже незначительных изменений в алгоритм необходимо полностью (или почти полностью) пересинтезировать всю схему автомата. «Отделаться» какими-то мелкими изменениями возможно далеко не всегда.
Обобщённая структурная схема УА с жёсткой логикой имеет вид – рис. 2.
Рис. 2. Обобщённая структурная схема УА с жёсткой логикой
На рис. 2: X – множество входных сигналов автомата, Y – множество выходных сигналов, D – сигналы управления памятью, T – сигналы состояния.
УА состоит из 2-х функциональных блоков:
1. КС – комбинационная схема, формирующая выходные сигналы автомата и сигналы управления памятью.
Функционирование УА может задаваться графом переходов либо таблицами истинности. Можно описать его поведение и формулами: Y=ƒ1(X,T), D=ƒ2(X,T).
Очевидно, что при использовании одновходовых триггеров (D и Т) КС получается проще (для каждого триггера формировать надо только один сигнал вместо 2, как для RS или JK триггеров). На практике, если, например, в наличии есть только RS-триггеры, то можно несколько «схитрить», сделав D-триггеры из RS и синтезировать КС в расчёте на D.
Следует также отметить, что всегда следует применять триггеры с синхронизацией. Если использовать триггеры без синхронизации, например, асинхронные RS-триггеры, то полученный автомат будет «перещёлкивать» все свои состояния очень быстро, со скоростью, определяемой скоростью работы элементов, входящих в КС и самих триггеров. Кроме того, на выходе могут появляться какие-то другие, случайные и «незапланированные» комбинации состояний выходов.
Если применяются D-триггеры, то можно использовать обычные регистры хранения вместо раздельных триггеров. Это может существенно упростить конечную схему.
УА с жёсткой логикой бывают 2-х видов – Мили и Мура.
1.1 Управляющий автомат Мили
Автомат Мили имеет структуру, на 100% совпадающую с рис. 2. И поведение его описывается теми же общими формулами – Y=ƒ1(X,T), D=ƒ2(X,T). Поэтому иногда говорят, что этот автомат генерирует (в смысле изменяет) выходные сигналы при переходах из одного состояния в другое. Здесь подчёркивается тот факт, что Y непосредственно зависит от X.
Рассмотрим синтез автомата Мили на примере.
Допустим, нам необходимо построить автомат, имеющий 2 входных сигнала (x1, x2) и 4 выходных (y1-y4):
Т.к. мы имеем 6 состояний, то нам понадобится 3 триггера. Используем для простоты D-триггеры. Построим теперь полную таблицу истинности автомата:
Также подразумевается, что состояния меняются по кругу. В разделе 1.2 показано, как реализовывается переход их одного состояния в 2 других в зависимости от разных входных сигналов.
По этой таблице уже можно синтезировать КС автомата. Но перед тем, как перейти непосредственно к синтезу, отметим небольшую особенность использованного кодирования состояний: сигнал T1 повторяет x1 со сдвигом на один такт. Это позволяет не строить какие-то формулы и схемы для сигнала D1, а сразу пустить x1 на D1. Подобные «уловки» в ряде случаев позволяют упростить схему и ускорить её быстродействие.
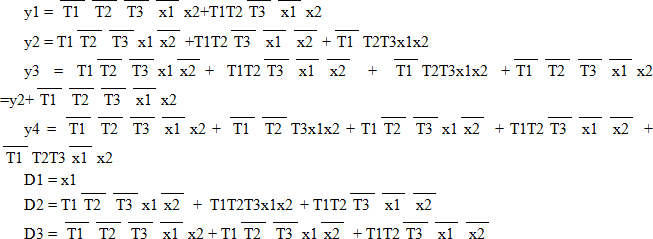
КС должна формировать 7 сигналов: y1-y4 и D1-D3. Составим формулы для каждого сигнала:
По формулам можно нарисовать схему автомата. Мы этого делать не будем, здесь и так всё понятно.
Следует отметить, что у автомата Мили теоретически возможна ситуация, при которой окажется, что какой-то yi зависит только от xj и не зависит от Tn. Т.е. автомат изменяет выходные сигналы, не изменяя своего состояния. Учесть это при синтезе сложно, гораздо проще после него ввести какие-то «ненужные» зависимости yi от каких-то Tn.
1.2 Управляющий автомат Мура
Автомат Мура отличается от Мили тем, что он описывается формулами Y=ƒ1(T), D=ƒ2(X,T). Т.е. его выходные сигналы зависят только от состояния триггеров. Поэтому его КС фактически распадается на 2 независимые КС – рис. 3.
Рис. 3 Структура автомата Мура
Построим автомат Мура для того же примера:
Сразу отметим, что состояния 2 и 5 для Мура полностью эквивалентны, т.к. они генерируют идентичные наборы выходных сигналов. Поэтому состояние 5 можно выбросить и добавить дополнительный переход из состояния 2 по сигналам x1x2=01 в состояние 0. Это действие заменит выброшенное 5-е состояние в плане переходов.
Исключение эквивалентных состояний в общем случае может сократить число триггеров автомата.
ТИ для КС1 (таблица переходов автомата):
Правила кодирования состояний те же, что и автомате Мили.
Коды состояний 001, 100, 101 и сочетание входных сигналов x1x2=10 не используются, это можно учитывать при минимизации.
Обратите внимание, что в таблице 2 строки, соответствующие состоянию 2. Строка 2b соответствует выброшенному состоянию 5. Видно, что из неё автомат переходит в состояние 0.
Получим минимальные формулы сигналов D1, D2 и D3 КС1:
Карта Карно для сигнала X1 – рис 4.
Рис 4. Карта Карно для сигнала X1.
Из карты следует, что D1 = x1. Это же видно из ТИ.
Аналогично:
D2 = x1 + T2 + T1 T2 T3 x2
D3 = T1 T2 T3 x2 + T2 + T1 T2 T3 x1
ТИ для КС2 автомата:
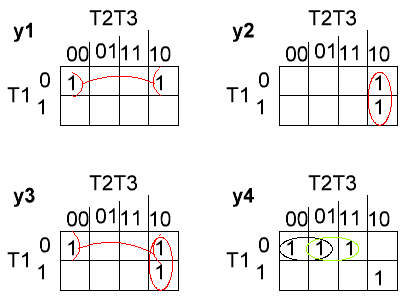
Рис.5 Карты Карно для сигналов y1-y4
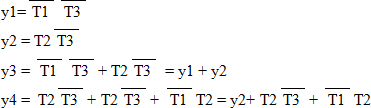
Из анализа формул видно, что y3 и y4 можно формировать, используя уже готовые y1 и y2. Это может дополнительно упростить КС2, но на практике такое решение снижает нагрузочную способность схемы на выходах y1 и y2.
Также, можно упростить реальную схему, если в каком-то смысле объединять схемы КС1 и КС2, формируя общие для них внутренние сигналы (например, T1 T3 ) и использовать их одновременно в обоих схемах. Конечно, обращая внимание на длину получаемых цепочек элементов и на их быстродействие (при увеличении длины цепочки падает её быстродействие).
Даже несмотря на то, что при рассмотрении автомата Мили мы не минимизировали его формулы, можно заметить, что автомат Мура проще уже потому, что для формирования Y не нужны сигналы X.
Раздел 2. Микропрограммное управление.
Основное достоинство рассмотренных УА с жёсткой логикой – их высокое быстродействие, определяемой быстродействием используемой элементной базы.
Однако есть и большие недостатки:
1. при необходимости внесения любых, даже небольших изменений алгоритма работы схему автомата надо полностью пересинтезировать.
2. при большом числе входных и выходных сигналов схема автомата сильно разрастается, а синтез становится сложным и тяжёлым занятием. Так, карты Карно уже при 5 аргументах (см. рис. 4) становятся трудночитаемыми и труднопонимаемыми, т.к. не все клетки, которые можно склеить и минимизировать, являются физически соседними. Неизбежным итогом этого может стать неполная минимизация и, как следствие излишне сложная и избыточная схема полученного автомата. На работоспособность схемы это, правда, не повлияет.
Второй недостаток особенно ярко проявляется при разработке различных вычислительных структур (часть 4), где есть много операционных узлов, для которых требуется очень много выходных сигналов и много состояний управляющего автомата.
В таких случаях используют принципиально другие УА – УА с микропрограммным управлением.
Структура такого УА изображена на рис. 6.
Рис. 6. Структура УА с микропрограммным управлением
Основа такого управляющего аппарата – ROM – ПЗУ. Каждая ячейка ПЗУ хранит микрокоманду (МК) – набор выходных сигналов Y для каждого состояния автомата и набор управляющих сигналов T для своего сугубо внутреннего устройства управления УУ.
В плане генерации выходных сигналов все микропрограммные автоматы идентичны автомату Мура – Y зависят только от состояния памяти автомата.
УА с микропрограммным управлением бывают 2-х типов – с естественной адресацией микрокоманд и с принудительной. В каждом случае структура УУ разная.
Рассмотрим эти 2 варианта.
2.1. Микропрограммный УА с принудительной адресацией
Структура УА с принудительной адресацией приведена на рис. 7.
Рис. 7. Структура УА с принудительной адресацией
На рис.7: MS1 – мультиплексор входных сигналов, MS2 – мультиплексор адреса микрокоманды, РАМК – регистр адреса микрокоманды, МПЗУ – ROM микропрограмм из рис. 6, РМК – регистр микрокоманд.
Разрядность MS2 и РАМК равна адресности ROM n=]log2k[, где k – кол-во микрокоманд автомата. Например, если у нас 13 микрокоманд, то для них надо 13 ячеек ПЗУ, для адресации которых требуется n=]log213[=4 разряда адреса.
Разрядность ПЗУ и РМК равна кол-ву всех сигналов, которое должна выдавать ROM
Формат РМК идентичен формату микрокоманды: A0 и A1 – адрес следующей МК в ПЗУ, по которому перейдёт автомат, если выбранный управляющий сигнал равен 0 или 1 соответственно. Nx – код входного сигнала, проверяемого в текущей МК, ОЧ – операционная часть, содержит все выходные сигналы автомата.
ДШМО – дешифратор микрооперации. Его назначение – уменьшить разрядность ПЗУ и РАМК, в том случае, если все или часть входных сигналов Y являются унитарными и их можно закодировать таким образом, чтобы разрядность поля ОЧ была меньше кол-ва выходных сигналов. В общем случае он не нужен.
В реальности регистр РМК можно исключить, т.к. ПЗУ не меняют состояния своих выходов при неизменности адреса. Т.е., пока содержимое РАМК неизменно, то и на выходах ПЗУ будет неизменная информация.
Целесообразность использования ДШМО на практике зависит и от разрядности реальных ПЗУ, из которых будет строиться МПЗУ автомата.
Так, например, если мы будем использовать 8-разрядные ПЗУ, то, понятно, что конечная разрядность МПЗУ будет кратна 8 битам. Поэтому, если, допустим, на все поля в сумме без доп. кодирования Y понадобится 15 разрядов, а с кодированием 12, то доп. кодирование каких-то Yi и введение дешифратора не приведёт к уменьшению конечного МПЗУ (и на 15 и на 12 сигналов надо 2 8-битных микросхемы ПЗУ), а дополнительный дешифратор только усложнит схему и, возможно, снизит её быстродействие. Но, если в распоряжении есть и 8 и 4-разрядные ПЗУ (8+4=12), то в случае с 12-разрядной МК мы можем применить не две 8-битные микросхемы, а одну 8 и одну 4 битную, то вариант с ДШ может оказаться выгоднее.
Также, следует отметить, что промышленность не выпускает регистров с двумя входными шинами (РАМК на рис. 7). Поэтому, при необходимости такой узел м.б. заменён многоразрядным мультиплексором с двух направлений и обычным одновходовым регистром.
Рассмотрим подробно работу микропрограммного автомата с принудительной адресацией.
Работа автомата начинается с занесения в регистр адреса микрокоманд (РАМК) кода операции (по сути стартового адреса микрокоманды). В простейшем случае вместо занесения адреса можно использовать вход сброса регистра.
На время исполнения микрокоманда из RAM копируется в регистр микрокоманд РМК.
Далее мультиплексор MS1 передаёт на свой выход значение входного сигнала Xi, указанного полем Nx микрокоманды.
По сигналу с MS1 мультиплексор MS2 выбирает один из двух адресов A0/А1 и передаёт его на вход РАМК.
После этого всё повторяется.
Отметим, что на первый (с номером 0) вход мультиплексора MS1 заведен постоянный лог. 0. Это даёт возможность реализации МК с безусловным переходом по адресу A0 в тех МК, где не нужно проверять никакие входные сигналы. Вместо лог. 0 можно использовать лог. 1. Это повлияет только на то, что адресом перехода будет считаться содержимое поля A1, а не A0.
Наличие MS1 обусловливает следующую особенность автомата – любая МК может проверять (учитывать) только один сигнал Xi. Это обстоятельство относится к любым автоматам с микропрограммным управлением (не только с принудительной адресацией). Поэтому, если в какой-либо МК необходимо проверять несколько Xi, то такая МК разбивается на несколько, проверяющих требуемые Xi в произвольном порядке.
В ряде случаев, если входных сигналов не очень много, то, в принципе, можно заменить мультиплексор MS1 простой схемой совпадения кодов, а в МК вместо Nx записывать требуемое сочетание Xi.
В качестве примера рассмотрим микропрограммную реализацию того же автомата, который мы рассматривали для моделей Мили и Мура.
Самостоятельное изучение схемотехники. Абстрактный автомат. Часть 2
Статья написана, собрана и сверстана Brotherofken. Спасибо ему огромное.
В предыдущей статье я попытался изложить все основные определения и принципы, чтобы сделать эту статью максимально понятной. Все не уместилось, так что я настоятельно советую ознакомиться с этими файлами:
Базис, Базис2, Минимизация. Далее в этой статье я оставил несколько разъясняющих пометок курсивом.
В этой статье я попробую объяснить доступным языком что такое абстрактный автомат, способы его представления. Так как теория автоматов полна математики и сложна, постараюсь писать человеческим языком, чтобы неподготовленный читатель смог понять о чём идёт речь.
Абстрактный автомат
Автомат должен будет реализовывать некоторые функции, которые заданы разработчиком. Он может быть простым сумматором, может реализовывать какую-либо микрокоманду процессора, выбирать слова из оперативной памяти или заниматься синтаксическим анализом выражения.
В общем виде, не вдаваясь в подробности, абстрактный автомат можно представить следующим образом: 
Или, если перейти от иллюстрации к математическому описанию:
A =
Такой автомат функционирует дискретно по времени, то есть значения входов, выходов и внутреннее состояние автомата изменяются в дискретные моменты времени.
Итак мы в общем виде описали что есть Абстрактный автомат. Примером такого автомата может быть триггер, регистр ЭВМ или сумматор.
Т.е. автомат типа Мили вырабатывает выходной сигнал когда у него меняется входной, в зависимости от его предыдущего состояния. При этом длительность выходного сигнала не зависит от длительности входного, а только от его присутствия. В автоматах типа Мура выходной сигнал зависит от состояния автомата в текущий момент времени т.е. автомат будет вырабатывать определенный выходной сигнал пока не изменит свое состояние.
Способы задания автоматов
Как мы выяснили в первой части — автомат представляет собой совокупность входного и выходного алфавитов, множества внутренних состояний и функций, определяющих переходы и выходы. Однако, обычно функции δ и λ не заданы, и поведение автомата приходится описывать по-другому.
Графы
Граф автомата – это ориентированный связный граф, вершины которого символизируют внутренние состояния автомата, а дуги – переходы из одного состояния в другое.
Для графа Мили на дугах указываются сходные и выходные буквы. Выходные буквы пишутся над дугами, символизируя то, что выходное состояние зависит от состояния автомата в предыдущий момент времени.
Для графа автомата Мура на дугах записываются только входные буквы, выходные же указываются около вершин.
Важный момент: Если из каждой вершины выходит столько дуг, сколько есть входных букв, то автомат называется полным. Другими словами – если из каждой вершины определены переходы для каждой входной буквы. В наших примерах автомат Мили является полным, а автомат Мура – частичным.
И ещё: Если из одной вершины выходит дуг больше, чем входных букв (то есть 2 и более дуг с одинаковыми входными буквами), то такой автомат называется недетерминированным. Такое может произойти при построении формализованного описания и тогда надо будет произвести переход к детерминированному автомату, но это не всегда можно выполнить. Описание этого процесса я тоже упускаю, сразу нарисовав детерминированный автомат.
На этом о графах всё.
Таблицы переходов и выходов.
Графы нагляднее для человека, а таблицы — для машины. Любой автомат можно представить в виде таблицы переходов и выходов (ТПВ). В ТПВ строками являются внутренние состояния автомата, а столбцами – входные буквы.
Построим ТПВ для наших графов Мили и Мура. Если не определена какая-либо входная или выходная буква, то вместо неё ставится прочерк. Если не определено состояние, то действует это же простое правило.
ТПВ графа Мили
В ТПВ Мили в каждой клетке записаны переходы и выходы. Например, если автомат находится в состоянии С0 и на вход приходит буква a1, то он перейдёт в состояние С1 и на выходе появится буква b3.
ТПВ графа Мура
Для графа Мура строят отмеченную таблицу переходов. Выделяется дополнительный столбец для выходных букв.
В клетке под входной буквой пишется в какое состояние автомат переходит, в крайней правой клетке — какую выходную букву возвращает.
Пример синтеза автомата
При помощи абстрактных автоматов можно описать практически что угодно. Можно описать работу цифровой схемы, а можно – синтаксический или лексический анализатор. Попробуем описать триггер – чем не автомат?
Чтобы задать граф нужно словесное описание алгоритма работы триггера. Читаем:
Кодируем входной и выходной алфавиты:
A =
B =
Строим граф автомата Мили:
Вот такая забавная чебурашка получилась :-). Теперь можно построить таблицу переходов и выходов:
Если расписать эту таблицу преобразовав условные обозначения в фактические, то получим таблицу которая представляет из себя таблицу переходов триггера. Затем её можно упростить:
Нанесём полученную функцию на карту Вейча и минимизируем:
Выпишем, что получилось:
Строим по функции схему (Выполняли домашнее задание?):
Немного непривычно видеть триггер в булевом базисе, поэтому переведём функцию в базис И-НЕ и нарисуем схему в нём:
А на схеме асинхронный RS триггер обозначается вот так:

Теперь если приложить немного старания, то можно самостоятельно синтезировать простую новогоднюю гирлянду.



