Автомат Мура
Автомат Мура (автомат второго рода) в теории вычислений — конечный автомат, выходное значение сигнала в котором зависит лишь от текущего состояния данного автомата, и не зависит напрямую, в отличие от автомата Мили, от входных значений. Автомат Мура назван в честь его изобретателя, Эдварда Ф. Мура, опубликовавшего исследования в 1956 году в издании «Gedanken-experiments on Sequential Machines.» [1]
Содержание
Формальное определение
Автомат Мура может быть определен как кортеж из 6 элементов, включающий:
Для любого автомата Мура существует эквивалентный ему автомат Мили и наоборот. Любой автомат Мура путем добавления ряда внутренних состояний может быть преобразован в автомат Мили.
Способы задания
См. также
Примечания
Литература

Полезное
Смотреть что такое «Автомат Мура» в других словарях:
автомат Мура — — [http://www.iks media.ru/glossary/index.html?glossid=2400324] Тематики электросвязь, основные понятия EN Moore machine … Справочник технического переводчика
автомат Мура — Moore o automatas statusas T sritis automatika atitikmenys: angl. Moore automaton vok. Moore Automat, m rus. автомат Мура, m pranc. automate Moore, m ryšiai: sinonimas – Muro automatas … Automatikos terminų žodynas
АВТОМАТ КОНЕЧНЫЙ — математическая модель устройства с конечной памятью, преобразующего дискретную информацию. А. к. является одним из важнейших видов управляющих сиcтем. Содержательно А. к. можно охарактеризовать как устройство, имеющее входной и выходной каналы и… … Математическая энциклопедия
Автомат Мили — Диаграмма состояний автомата Мили (Граф автомата) Автомат Мили (англ. Mealy machine) конечный автомат, выходная последовательность которого (в отличие от автомата Мура) зависит от состояния … Википедия
Мура прибор — МУРА или МООРА ПРИБОРЪ, или т. наз. автомат. прицѣлъ (см. Автоматич. прицѣливаніе), приборъ, устраняющій возм сть выстрѣла изъ оружія, пока ему не приданъ уголъ возвышенія, соотв щій установкѣ прицѣла. Устр во прибора: на оси а, помѣщенной въ… … Военная энциклопедия
Клеточный автомат — дискретная модель, изучаемая в математике, теории вычислимости, физике, теоретической биологии и микромеханике. Включает регулярную решётку ячеек, каждая из которых может находиться в одном из конечного множества состояний, таких как 1 и 0.… … Википедия
Фронтальный клеточный автомат — (англ. frontal cellular automata, FCA) специальный тип вычислительных алгоритмов, основанных на моделях клеточных автоматов. Название «фронтальный» происходит от одного из популярных применений, а именно, рост кристаллов, когда граница… … Википедия
Классификация абстрактных автоматов — Содержание 1 Классификация автоматов по логическим свойствам функций переходов и выходов 1.1 … Википедия
АВТОМАТОВ СПОСОБЫ ЗАДАНИЯ — варианты описания автоматов, их функционирования или поведения. А. с. з. зависят от подхода к определению понятия автомата. При макроподходе (см. Автомат конечный).описывается внешнее поведение автомата; при микроподходе задание должно содержать… … Математическая энциклопедия
Функционирование и синтез цифровых устройств. Часть 3
Управляющие автоматы. Принцип микропрограммного управления
Введение
Любое устройство можно структурно разделить на управляющую часть и исполнительную. Управляющая часть (управляющий автомат, УА) отвечает за взаимодействие с внешней средой, а исполнительная (операционный автомат, ОА) – за выполнение каких-то действий.
На примере простой ёлочной гирлянды – лампочки – исполнительная часть, а микросхему, которая ими управляет – управляющая.
В простейшем случае, УА может представлять собой соединённые последовательно генератор низкой частоты (0.5-2 Гц), двоичный счётчик и дешифратор – рис. 1.
Рис. 1. Простейший УА
В этом случае, на выходе дешифратора будет появляться бегущая единица. Можно также подключить лампы непосредственно к выходам счётчика и т.д.
Из схемы понятны аспекты работы этого УУ:
Недостатки тоже очевидны:
1. Невозможность какого-либо внешнего управления работой УУ. Управлять можно только частотой генератора и параметрами импульсов (если взять генератор «получше»). Алгоритмы работы счётчика и дешифратора вообще жёстко фиксированы, т.к. это стандартные узлы со стандартным «поведением» и т.д.
2. Если мы захотим включать лампочки как-то иначе, например в порядке 0, 2, 1, 3, (или вообще «на лету» менять каким-либо образом эту очерёдность) либо включать их парами (например, 0-1, 2-3), то окажется, что этого в принципе сделать нельзя, т.к. счётчик/дешифратор или какие-то другие стандартные элементы «не умеют» так работать.
Для преодоления этих недостатков разрабатывают специальные УА.
Раздел 1. Управляющие автоматы с жёсткой логикой
Теория управляющих абстрактных и конечных автоматов – очень обширная наука, описывающая понятие автоматов, их поведение, формализацию, различные модели и пр. Здесь не будут рассматриваться все эти теоретические аспекты, рассмотрим лишь две практических варианта УА с жёсткой логикой.
Название «автомат с жёсткой логикой» проистекает из того, что алгоритм функционирования такого автомата жёстко задан его схемой. Для внесения даже незначительных изменений в алгоритм необходимо полностью (или почти полностью) пересинтезировать всю схему автомата. «Отделаться» какими-то мелкими изменениями возможно далеко не всегда.
Обобщённая структурная схема УА с жёсткой логикой имеет вид – рис. 2.
Рис. 2. Обобщённая структурная схема УА с жёсткой логикой
На рис. 2: X – множество входных сигналов автомата, Y – множество выходных сигналов, D – сигналы управления памятью, T – сигналы состояния.
УА состоит из 2-х функциональных блоков:
1. КС – комбинационная схема, формирующая выходные сигналы автомата и сигналы управления памятью.
Функционирование УА может задаваться графом переходов либо таблицами истинности. Можно описать его поведение и формулами: Y=ƒ1(X,T), D=ƒ2(X,T).
Очевидно, что при использовании одновходовых триггеров (D и Т) КС получается проще (для каждого триггера формировать надо только один сигнал вместо 2, как для RS или JK триггеров). На практике, если, например, в наличии есть только RS-триггеры, то можно несколько «схитрить», сделав D-триггеры из RS и синтезировать КС в расчёте на D.
Следует также отметить, что всегда следует применять триггеры с синхронизацией. Если использовать триггеры без синхронизации, например, асинхронные RS-триггеры, то полученный автомат будет «перещёлкивать» все свои состояния очень быстро, со скоростью, определяемой скоростью работы элементов, входящих в КС и самих триггеров. Кроме того, на выходе могут появляться какие-то другие, случайные и «незапланированные» комбинации состояний выходов.
Если применяются D-триггеры, то можно использовать обычные регистры хранения вместо раздельных триггеров. Это может существенно упростить конечную схему.
УА с жёсткой логикой бывают 2-х видов – Мили и Мура.
1.1 Управляющий автомат Мили
Автомат Мили имеет структуру, на 100% совпадающую с рис. 2. И поведение его описывается теми же общими формулами – Y=ƒ1(X,T), D=ƒ2(X,T). Поэтому иногда говорят, что этот автомат генерирует (в смысле изменяет) выходные сигналы при переходах из одного состояния в другое. Здесь подчёркивается тот факт, что Y непосредственно зависит от X.
Рассмотрим синтез автомата Мили на примере.
Допустим, нам необходимо построить автомат, имеющий 2 входных сигнала (x1, x2) и 4 выходных (y1-y4):
Т.к. мы имеем 6 состояний, то нам понадобится 3 триггера. Используем для простоты D-триггеры. Построим теперь полную таблицу истинности автомата:
Также подразумевается, что состояния меняются по кругу. В разделе 1.2 показано, как реализовывается переход их одного состояния в 2 других в зависимости от разных входных сигналов.
По этой таблице уже можно синтезировать КС автомата. Но перед тем, как перейти непосредственно к синтезу, отметим небольшую особенность использованного кодирования состояний: сигнал T1 повторяет x1 со сдвигом на один такт. Это позволяет не строить какие-то формулы и схемы для сигнала D1, а сразу пустить x1 на D1. Подобные «уловки» в ряде случаев позволяют упростить схему и ускорить её быстродействие.
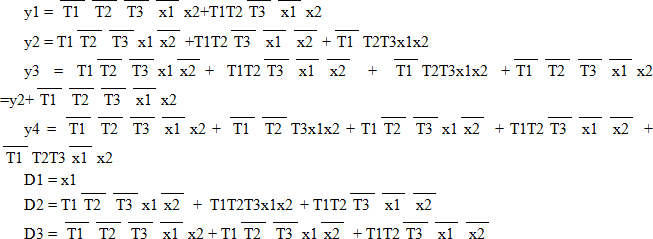
КС должна формировать 7 сигналов: y1-y4 и D1-D3. Составим формулы для каждого сигнала:
По формулам можно нарисовать схему автомата. Мы этого делать не будем, здесь и так всё понятно.
Следует отметить, что у автомата Мили теоретически возможна ситуация, при которой окажется, что какой-то yi зависит только от xj и не зависит от Tn. Т.е. автомат изменяет выходные сигналы, не изменяя своего состояния. Учесть это при синтезе сложно, гораздо проще после него ввести какие-то «ненужные» зависимости yi от каких-то Tn.
1.2 Управляющий автомат Мура
Автомат Мура отличается от Мили тем, что он описывается формулами Y=ƒ1(T), D=ƒ2(X,T). Т.е. его выходные сигналы зависят только от состояния триггеров. Поэтому его КС фактически распадается на 2 независимые КС – рис. 3.
Рис. 3 Структура автомата Мура
Построим автомат Мура для того же примера:
Сразу отметим, что состояния 2 и 5 для Мура полностью эквивалентны, т.к. они генерируют идентичные наборы выходных сигналов. Поэтому состояние 5 можно выбросить и добавить дополнительный переход из состояния 2 по сигналам x1x2=01 в состояние 0. Это действие заменит выброшенное 5-е состояние в плане переходов.
Исключение эквивалентных состояний в общем случае может сократить число триггеров автомата.
ТИ для КС1 (таблица переходов автомата):
Правила кодирования состояний те же, что и автомате Мили.
Коды состояний 001, 100, 101 и сочетание входных сигналов x1x2=10 не используются, это можно учитывать при минимизации.
Обратите внимание, что в таблице 2 строки, соответствующие состоянию 2. Строка 2b соответствует выброшенному состоянию 5. Видно, что из неё автомат переходит в состояние 0.
Получим минимальные формулы сигналов D1, D2 и D3 КС1:
Карта Карно для сигнала X1 – рис 4.
Рис 4. Карта Карно для сигнала X1.
Из карты следует, что D1 = x1. Это же видно из ТИ.
Аналогично:
D2 = x1 + T2 + T1 T2 T3 x2
D3 = T1 T2 T3 x2 + T2 + T1 T2 T3 x1
ТИ для КС2 автомата:
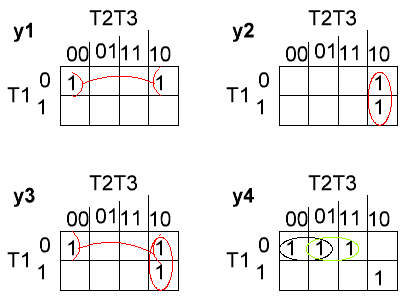
Рис.5 Карты Карно для сигналов y1-y4
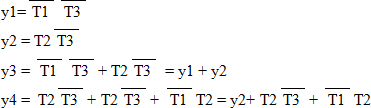
Из анализа формул видно, что y3 и y4 можно формировать, используя уже готовые y1 и y2. Это может дополнительно упростить КС2, но на практике такое решение снижает нагрузочную способность схемы на выходах y1 и y2.
Также, можно упростить реальную схему, если в каком-то смысле объединять схемы КС1 и КС2, формируя общие для них внутренние сигналы (например, T1 T3 ) и использовать их одновременно в обоих схемах. Конечно, обращая внимание на длину получаемых цепочек элементов и на их быстродействие (при увеличении длины цепочки падает её быстродействие).
Даже несмотря на то, что при рассмотрении автомата Мили мы не минимизировали его формулы, можно заметить, что автомат Мура проще уже потому, что для формирования Y не нужны сигналы X.
Раздел 2. Микропрограммное управление.
Основное достоинство рассмотренных УА с жёсткой логикой – их высокое быстродействие, определяемой быстродействием используемой элементной базы.
Однако есть и большие недостатки:
1. при необходимости внесения любых, даже небольших изменений алгоритма работы схему автомата надо полностью пересинтезировать.
2. при большом числе входных и выходных сигналов схема автомата сильно разрастается, а синтез становится сложным и тяжёлым занятием. Так, карты Карно уже при 5 аргументах (см. рис. 4) становятся трудночитаемыми и труднопонимаемыми, т.к. не все клетки, которые можно склеить и минимизировать, являются физически соседними. Неизбежным итогом этого может стать неполная минимизация и, как следствие излишне сложная и избыточная схема полученного автомата. На работоспособность схемы это, правда, не повлияет.
Второй недостаток особенно ярко проявляется при разработке различных вычислительных структур (часть 4), где есть много операционных узлов, для которых требуется очень много выходных сигналов и много состояний управляющего автомата.
В таких случаях используют принципиально другие УА – УА с микропрограммным управлением.
Структура такого УА изображена на рис. 6.
Рис. 6. Структура УА с микропрограммным управлением
Основа такого управляющего аппарата – ROM – ПЗУ. Каждая ячейка ПЗУ хранит микрокоманду (МК) – набор выходных сигналов Y для каждого состояния автомата и набор управляющих сигналов T для своего сугубо внутреннего устройства управления УУ.
В плане генерации выходных сигналов все микропрограммные автоматы идентичны автомату Мура – Y зависят только от состояния памяти автомата.
УА с микропрограммным управлением бывают 2-х типов – с естественной адресацией микрокоманд и с принудительной. В каждом случае структура УУ разная.
Рассмотрим эти 2 варианта.
2.1. Микропрограммный УА с принудительной адресацией
Структура УА с принудительной адресацией приведена на рис. 7.
Рис. 7. Структура УА с принудительной адресацией
На рис.7: MS1 – мультиплексор входных сигналов, MS2 – мультиплексор адреса микрокоманды, РАМК – регистр адреса микрокоманды, МПЗУ – ROM микропрограмм из рис. 6, РМК – регистр микрокоманд.
Разрядность MS2 и РАМК равна адресности ROM n=]log2k[, где k – кол-во микрокоманд автомата. Например, если у нас 13 микрокоманд, то для них надо 13 ячеек ПЗУ, для адресации которых требуется n=]log213[=4 разряда адреса.
Разрядность ПЗУ и РМК равна кол-ву всех сигналов, которое должна выдавать ROM
Формат РМК идентичен формату микрокоманды: A0 и A1 – адрес следующей МК в ПЗУ, по которому перейдёт автомат, если выбранный управляющий сигнал равен 0 или 1 соответственно. Nx – код входного сигнала, проверяемого в текущей МК, ОЧ – операционная часть, содержит все выходные сигналы автомата.
ДШМО – дешифратор микрооперации. Его назначение – уменьшить разрядность ПЗУ и РАМК, в том случае, если все или часть входных сигналов Y являются унитарными и их можно закодировать таким образом, чтобы разрядность поля ОЧ была меньше кол-ва выходных сигналов. В общем случае он не нужен.
В реальности регистр РМК можно исключить, т.к. ПЗУ не меняют состояния своих выходов при неизменности адреса. Т.е., пока содержимое РАМК неизменно, то и на выходах ПЗУ будет неизменная информация.
Целесообразность использования ДШМО на практике зависит и от разрядности реальных ПЗУ, из которых будет строиться МПЗУ автомата.
Так, например, если мы будем использовать 8-разрядные ПЗУ, то, понятно, что конечная разрядность МПЗУ будет кратна 8 битам. Поэтому, если, допустим, на все поля в сумме без доп. кодирования Y понадобится 15 разрядов, а с кодированием 12, то доп. кодирование каких-то Yi и введение дешифратора не приведёт к уменьшению конечного МПЗУ (и на 15 и на 12 сигналов надо 2 8-битных микросхемы ПЗУ), а дополнительный дешифратор только усложнит схему и, возможно, снизит её быстродействие. Но, если в распоряжении есть и 8 и 4-разрядные ПЗУ (8+4=12), то в случае с 12-разрядной МК мы можем применить не две 8-битные микросхемы, а одну 8 и одну 4 битную, то вариант с ДШ может оказаться выгоднее.
Также, следует отметить, что промышленность не выпускает регистров с двумя входными шинами (РАМК на рис. 7). Поэтому, при необходимости такой узел м.б. заменён многоразрядным мультиплексором с двух направлений и обычным одновходовым регистром.
Рассмотрим подробно работу микропрограммного автомата с принудительной адресацией.
Работа автомата начинается с занесения в регистр адреса микрокоманд (РАМК) кода операции (по сути стартового адреса микрокоманды). В простейшем случае вместо занесения адреса можно использовать вход сброса регистра.
На время исполнения микрокоманда из RAM копируется в регистр микрокоманд РМК.
Далее мультиплексор MS1 передаёт на свой выход значение входного сигнала Xi, указанного полем Nx микрокоманды.
По сигналу с MS1 мультиплексор MS2 выбирает один из двух адресов A0/А1 и передаёт его на вход РАМК.
После этого всё повторяется.
Отметим, что на первый (с номером 0) вход мультиплексора MS1 заведен постоянный лог. 0. Это даёт возможность реализации МК с безусловным переходом по адресу A0 в тех МК, где не нужно проверять никакие входные сигналы. Вместо лог. 0 можно использовать лог. 1. Это повлияет только на то, что адресом перехода будет считаться содержимое поля A1, а не A0.
Наличие MS1 обусловливает следующую особенность автомата – любая МК может проверять (учитывать) только один сигнал Xi. Это обстоятельство относится к любым автоматам с микропрограммным управлением (не только с принудительной адресацией). Поэтому, если в какой-либо МК необходимо проверять несколько Xi, то такая МК разбивается на несколько, проверяющих требуемые Xi в произвольном порядке.
В ряде случаев, если входных сигналов не очень много, то, в принципе, можно заменить мультиплексор MS1 простой схемой совпадения кодов, а в МК вместо Nx записывать требуемое сочетание Xi.
В качестве примера рассмотрим микропрограммную реализацию того же автомата, который мы рассматривали для моделей Мили и Мура.
Автоматы Мура и Мили
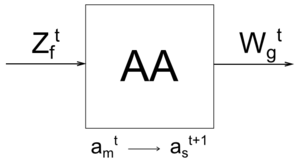
Выходные сигналы АА зависят от того, что поступало на его вход раньше.
Рассмотрим функционирование автоматов Мура и Мили.
[math]a(t+1) = \delta (a(t), z(t))[/math]
[math]w(t) = \lambda (a(t), z(t))[/math]
[math]a(t+1) = \delta (a(t), z(t))[/math]
[math]w(t) = \lambda (a(t))[/math]
В автоматах Мура выходные воздействия записаны на состояниях, а в автомате Мили — на переходах.
Содержание
Применение автоматов Мура и Мили [ править ]
Автоматы Мура и Мили широко применяются при проектировании цифровых устройств на основе программируемых логических интегральных схем (ПЛИС).
Наличие минимальной выходной задержки, связанной с переключением выходного регистра, отсутствие нестабильности переходного процесса на выходе автомата, отсутствие сквозного распространения сигнала через комбинационную схему от входа до выхода автомата, простота описания на языках описания аппаратуры HDL делает автомат Мура практически незаменимым.
Также автоматы Мура и взаимодействующие автоматы Мили используются в генетическом программировании (например, для решения задачи об «Умном муравье» [1] ).
Автомат, регулирующий пешеходный переход [ править ]
Рассмотрим автомат, регулирующий пешеходный переход по запросу пешеходов. Внешние события автомата — это события нажатия пешеходами кнопки-запроса на тротуаре и исчерпание тайм-аута. Автомат строится как автомат Мура, в котором выход — регулирование светофора и разрешающий сигнал на переход — это потенциальные сигналы, являющиеся функциями состояния.
Торговый автомат [ править ]
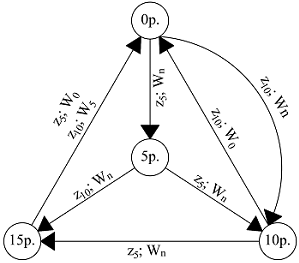
В качестве примера применения автомата Мили рассмотрим автомат по продаже шоколадок стоимостью [math]20[/math] рублей, принимающий монеты номиналом в [math]5[/math] и [math]10[/math] рублей и возвращающий сдачу, если это необходимо.
Входных сигналов [math]Z[/math] два: [math]Z_5[/math] — [math]5[/math] рублей и [math]Z_<10>[/math] — [math]10[/math] рублей.
Выходных сигналов [math]W[/math] три: [math]W_
Способы задания автоматов [ править ]
Табличный способ задания автомата Мили [ править ]
Автомат Мили может быть задан таблицей переходов и таблицей выходов.
| [math]a_ | ||
| [math]z_ | [math]a_ | [math]=\delta (a_ |
| [math]a_ | ||
| [math]z_ | [math]w_ | [math]=\lambda (a_ |
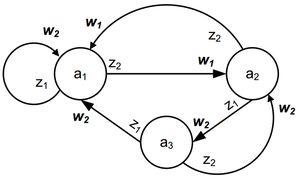
Пример: Задание автомата Мили табличным способом (автомат имеет два входных сигнала, два выходных сигнала и три состояния).
| [math]\delta[/math] | [math]a_<1>[/math] | [math]a_<2>[/math] | [math]a_<3>[/math] |
| [math]z_<1>[/math] | [math]a_<1>[/math] | [math]a_<3>[/math] | [math]a_<1>[/math] |
| [math]z_<2>[/math] | [math]a_<2>[/math] | [math]a_<1>[/math] | [math]a_<2>[/math] |
| [math]\lambda[/math] | [math]a_<1>[/math] | [math]a_<2>[/math] | [math]a_<3>[/math] |
| [math]z_<1>[/math] | [math]w_<2>[/math] | [math]w_<2>[/math] | [math]w_<2>[/math] |
| [math]z_<2>[/math] | [math]w_<1>[/math] | [math]w_<1>[/math] | [math]w_<2>[/math] |
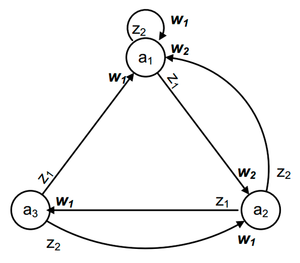
Графический способ задания автомата Мили [ править ]
На рисунке приведен граф автомата Мили на 3 состояния, имеющий 2 входных сигнала и 2 выходных сигнала (см. предыдущий пример).
Табличный способ задания автомата Мура [ править ]
В автомате Мура выходной сигнал зависит только от состояния автомата и не зависит от входного сигнала.
Поэтому достаточно для задания автомата Мура в таблице переходов добавить одну строку.
| [math]\lambda[/math] | [math]w_<1>[/math] | [math]w_<2>[/math] | [math]w_<1>[/math] | [math]w_<2>[/math] | [math]w_<2>[/math] |
| [math]\delta[/math] | [math]a_<1>[/math] | [math]a_<2>[/math] | [math]a_<3>[/math] | [math]a_<4>[/math] | [math]a_<5>[/math] |
| [math]z_<1>[/math] | [math]a_<2>[/math] | [math]a_<2>[/math] | [math]a_<5>[/math] | [math]a_<5>[/math] | [math]a_<2>[/math] |
| [math]z_<2>[/math] | [math]a_<3>[/math] | [math]a_<3>[/math] | [math]a_<1>[/math] | [math]a_<1>[/math] | [math]a_<4>[/math] |
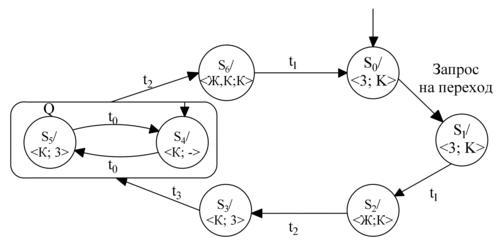
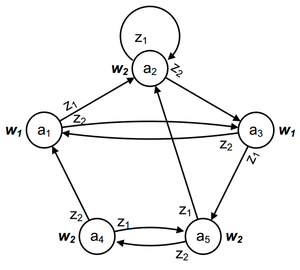
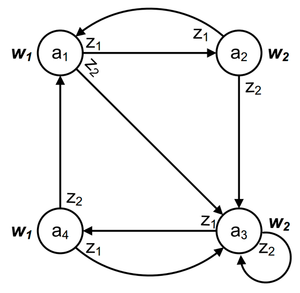
Графический способ задания автомата Мура [ править ]
На рисунке приведен граф автомата Мура на 5 состояний, имеющий 2 входных сигнала и 2 выходных сигнала.
Реакция автоматов на входное слово [ править ]
Автомат Мили [ править ]
Допустим, входное слово [math]\xi[/math] поступает на вход автомата буква за буквой.
Выходное слово [math]\omega[/math] называется реакцией автомата Мили на входное слово [math]\xi[/math] в состоянии [math]a_<1>[/math] строится по таблице переходов и выходов).
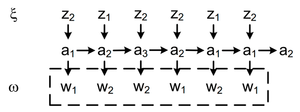
Реакцию автомата на входное слово [math]\xi[/math] можно заменить обходом графа.
Автомат Мура [ править ]
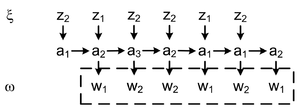
В рассматриваемом примере для автоматов Мили и Мура реакции автоматов на одинаковое входное слово совпадают, но они сдвинуты на один такт. Автоматы Мили и Мура дающие одинаковые реакции на одинаковые входные слова называются эквивалентными. Данное замечание приводит к задаче построения эквивалентных автоматов, дающих одинаковые реакции на одинаковые входные слова.
Эквивалентность автоматов Мили и Мура [ править ]
Автомат Мура переходит в автомат Мили, если всем переходам в состояние поставить выходные воздействия этого состояния. После таких преобразований получим эквивалентный автомат Мили.
Однако, чтобы преобразовать автомат Мили в автомат Мура такой алгоритм не подходит, т.к. в одно состояние могут вести разные переходы. Но можно просто добавить новых состояний, устанавливая необходимые соответствия.
Далее будет приведено формальное доказательство факта эквивалентности с явным предъявлением конструкции.
| Теорема (Эквивалентность автоматов Мура и Мили): | |||||||
| Мура | Мили |
| [math]\delta _ (a_ | [math]\delta _ (a_ |
| [math]\lambda _(a_ | [math]\lambda _ (a_ |
При переходе от автомата Мура к автомату Мили функции переходов также совпадают, а для определения функции выходов выходные сигналы с вершин опускается на входные дуги.
Проделав такие преобразования мы должны доказать, что получили автомат Мили, эквивалентный автомату Мура, т.е. что реакции автоматов на одинаковые входные воздействия совпадают.
При таком переходе (Мура к Мили) число состояний совпадает.
Таким образом, для выходной последовательности длины 1 поведение автоматов [math]S_<1>[/math] и [math]S_<2>[/math] полностью совпадает. Далее по индукции получаем эквивалентность автоматов.
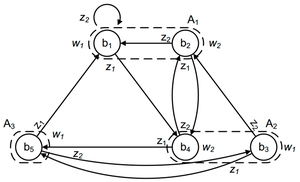
Переход от автомата Мили к автомату Мура [ править ]
Требуется перейти к автомату Мура
Для определения алфавита состояний, функций переходов и выходов автомата Мура воспользуемся следующей вспомогательной таблицей.
| Мура | Мили |
 | [math]A_ |
| [math]a_<1>: A_ <1>= \left \ < \begin | [math]a_<2>: A_ <2>= \left \ < \begin | [math]a_<3>: A_ <3>= \< (a_<3>, w_<1>) \> = b_<5>[/math] |
При определении функции переходов результирующего автомата Мура из всех состояний, порожденных одним состоянием автомата Мили, должны быть переходы под воздействием одинаковых входных сигналов.
Поскольку в автомате Мура выходной сигнал зависит только от состояния автомата, то в примере рядом с состояниями проставим соответствующие выходные сигналы.
И так если осуществить следующие преобразования, то получим:
| Мили | Мура | Мили |
| [math]S_ <1>\rightarrow[/math] | [math]S_ <2>\rightarrow[/math] | [math]S_<3>[/math] |
| 3 состояния | 5 состояний | 5 состояний |
Методы взаимной транспозиции автоматов Мили и Мура показывают, что при переходе от автомата Мили к автомату Мура число состояний принципиально не меняется. В то время как при обратном переходе в автомат Мура число состояний, как правило, увеличивается. Вследствие транзитивности отношения эквивалентности два автомата Мили, первый из которых получен из автомата Мура, так же будут эквивалентны, но у второго автомата число состояний будет больше. Таким образом эквивалентные между собой автоматы могут иметь различное число состояний. В связи с чем и возникает задача нахождения минимального автомата в классе эквивалентных между собой автоматов. Существование для любого абстрактного автомата эквивалентного ему абстрактного автомата с минимальным числом внутренних состояний впервые было доказано Муром.



