Что такое обратная связь в электронике и автоматике
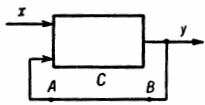
На функционирующую систему, кроме выходной величины, могут действовать также внешние воздействия (х на рис. 1). Цепь AB, по которой передается обратная связь, называется цепью, линией или каналом обратной связи.
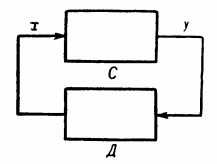
Канал может сам содержать какую-либо систему (Д, рис. 2), преобразующую выходную величину в процессе ее передачи. В этом случае говорят, что обратная связь с выхода системы на ее вход осуществляется с помощью или через посредство системы Д.
Обратная связь является одним из важнейших понятий электроники и теории автоматического управления. Конкретные примеры реализации систем, содержащих обратные связи, можно обнаружить при изучении самых разнообразных процессов в автоматических системах, живых организмах, экономических структурах и т. п.
В силу универсальности понятия применимого в различных областях науки и техники, терминология в этой области не установилась, и в каждой частной области знаний, как правило, используется своя терминология.

Так, например, в системах автоматического регулирования широко применяются понятия отрицательной и положительной обратной связи, которыми определяется связь выхода системы с ее входом через усилительное звено с соответственно отрицательным или положительным коэффициентом усиления.
В теории электронных усилителей смысл этих терминов иной: отрицательной называется обратная связь, уменьшающая абсолютную величину общего коэффициента усиления, а положительной — увеличивающая ее.
В зависимости от способов реализации в теории электронных усилителей выделяют обратные связи по току, по напряжению и комбинированную.
В системы автоматического регулирования часто вводят дополнительные обратные связи, используемые для стабилизации систем или улучшения переходных процессов в них. Они иногда называются корректирующими и среди них выделяют жесткую (осуществляемую с помощью усилительного звена), гибкую (реализуемую дифференцирующим звеном), изодромную и т. п.
В различных системах можно всегда обнаружить замкнутую цепь воздействий. Например, на рис. 2 часть С системы действует на часть Д, а последняя снова на С. Поэтому такие системы называют также системами с замкнутой цепью воздействий, системами с замкнутым циклом или замкнутым контуром.
В сложных системах может существовать множество различных цепей обратных связей. В многоэлементной системе выход каждого элемента может, вообще говоря, воздействовать на входы всех остальных элементов, включая свой собственный вход.
Любое воздействие можно рассматривать с трех основных сторон: метаболической, энергетической и информационной. Первая связана с изменениями расположения, формы и состава вещества, вторая — с передачей и преобразованием энергии, а третья — с передачей и преобразованием информации.
В теории управления рассматривается исключительно информационная сторона воздействий. Таким образом, обратная связь может быть определена как передача информации о выходной величине системы на ее вход либо как поступление информации, преобразованной звеном обратной связи, с выхода на вход системы.
На применении обратной связи основан принцип устройства систем автоматического регулирования (САР). В них наличие обратной связи обеспечивает повышение помехоустойчивости из-за уменьшения влияния помехи (z на рис. 3), действующей в прямом тракте системы.
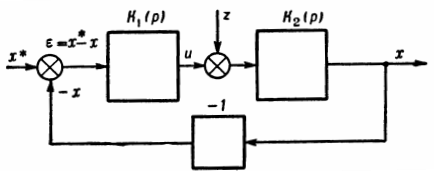
Если в линейной системе со звеньями, обладающими передаточными фциями Кх(р) и К2(р), снять цепь обратной связи, то изображение х выходной величины х определится следующим соотношением:

Если при этом требуется, чтобы выходная величина х в точности равнялась задающему воздействию х*, то общий коэффициент усиления системы К(р)= К1(р)К2(р) должен равняться единице, а помеха z должна отсутствовать. Наличие z и отклонение К(р) от единицы обусловливают возникновение погрешности е, т. е. разности

Если теперь замкнуть систему с помощью обратной связи, как показано на рис. 3, изображение выходной величины х будет определяться следующим соотношением:

Из соотношения следует, что при достаточно большом по модулю коэффициент усиления Кх(р) второе слагаемое пренебрежимо мало и, следовательно, влияние помехи z ничтожно. В то же время значение выходной величины х будет очень мало отличаться от значения задающего воздействия.

В замкнутой системе с обратной связью удается значительно уменьшить влияние помех по сравнению с разомкнутой системой, т. к. последняя не реагирует на действительное состояние управляемого объекта, «слепа» и «глуха» к изменению этого состояния.
Рассмотрим в качестве примера полет самолета. Если заранее с высокой точностью установить рули самолета так, чтобы он летел в заданном направлении, и жестко закрепить их, то порывы ветра и др. случайные и заранее непредвиденные факторы собьют самолет с нужного курса.
Исправить положение в состоянии только система с обратной связью (автопилот), способная сравнивать заданный курс х* с фактическим х и в зависимости от образовавшегося рассогласования изменять положение рулей.

О системах с обратной связью часто говорят, что они управляются ошибкой е (рассогласованием). Если звено Кх(р) представляет собой усилитель с достаточно большим коэффициентом усиления, то при определенных условиях, наложенных на передаточную функцию К2(р) остальной части тракта, замкнутая система остается устойчивой.
Обратная связь в смешанных системах имеет место также и при функционировании сложных систем, состоящих из объектов различной природы, но действующих целенаправленно. Такими являются системы: оператор (человек) и машина, учитель и ученик, лектор и аудитория, человек и обучаемое устройство.
Во всех этих примерах мы имеем дело с замкнутой цепью воздействий. По каналам обратной связи оператор получает информацию о характере функционирования управляемой машины, обучающий — информацию о поведении ученика и о результатах обучения и т. п. Во всех этих случаях в процессе функционирования существенно изменяются как содержание информации, передаваемое по каналам, так и сами каналы.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Автомобильный справочник
для настоящих любителей техники
Техника автоматического регулирования

Принцип, по которому построены техника автоматического регулирования, состоит в том, что регулятор изменяет регулирующее воздействие при отклонении регулируемой переменной от заданного значения независимо от причин, вызвавших это отклонение. Таким образом, в зависимости от значения выходного сигнала объекта регулятор изменяет его входной сигнал. Вот о том, из чего состоит техника автоматического регулирования, мы и поговорим в этой статье.

Термины и определения
(в соответствии с DIN 19226)
Управление с обратной связью
В технологическом процессе функцией системы управления с обратной связью является поддержание определенного физического параметра (управляемой переменной у) в соответствии с заданным значением. 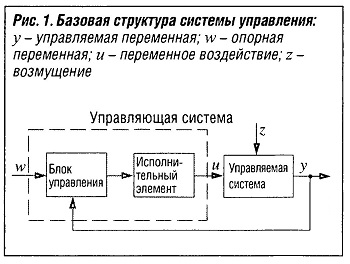 При этом значение управляемой переменной непрерывно измеряется и сравнивается с заданным значением (опорной переменной w, например, при установке напряжения генератора в функции степени заряда аккумулятора) (см. рис. «Базовая структура системы управления» ). В случае отклонения производится соответствующее управление корректирующей переменной и (например, изменение тока возбуждения генератора) таким образом, чтобы управляемая переменная у снова вернулась к заданному значению. Этот процесс имеет место в системе управления с замкнутым контуром (с обратной связью). Отклонения могут возникать под действием возмущений z (например, включения дополнительных электрических потребителей), воздействующих на управляемую систему и влияющих на управляемую переменную у неблагоприятным образом.
При этом значение управляемой переменной непрерывно измеряется и сравнивается с заданным значением (опорной переменной w, например, при установке напряжения генератора в функции степени заряда аккумулятора) (см. рис. «Базовая структура системы управления» ). В случае отклонения производится соответствующее управление корректирующей переменной и (например, изменение тока возбуждения генератора) таким образом, чтобы управляемая переменная у снова вернулась к заданному значению. Этот процесс имеет место в системе управления с замкнутым контуром (с обратной связью). Отклонения могут возникать под действием возмущений z (например, включения дополнительных электрических потребителей), воздействующих на управляемую систему и влияющих на управляемую переменную у неблагоприятным образом.
Процессы управления с обратной связью осуществляются в автомобиле в самых различных системах. В качестве примера можно привести регулирование температуры охлаждающей жидкости двигателя, управление кондиционером и многие другие операции регулирования и управления двигателем (контроль детонации, контроль значения λ), трансмиссией (управление сцеплением) и шасси (контроль рыскания).
Системы управления без обратной связи
Довольно часто используются также системы регулирования и управления без обратной связи (с разомкнутым контуром). В этом случае замкнутая система управления заменяется на разомкнутую. Этот процесс возможен только в том случае, если поведение управляемой системы точно известно, и на нее не воздействуют никакие (не поддающиеся измерению) возмущения z.
Управление с обратной связью является предпочтительным, поскольку при этом со стабильностью управляемой величины не возникает проблем, связанных с отсутствием обратной связи. Поскольку вышеупомянутые условия на практике имеют место весьма редко, использование систем с обратной связью в большинстве случаев является неизбежным.
Комбинация замкнутых (с обратной связью) и разомкнутых (без обратной связи) контуров управления
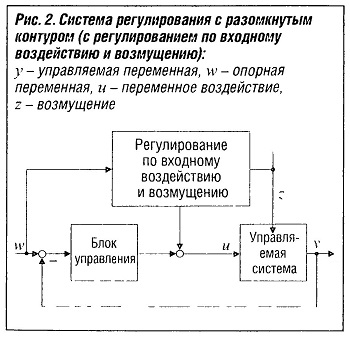 На практике, с целью использования преимуществ обеих структур, часто осуществляется комбинирование замкнутых и разомкнутых контуров управления. При этом установленные связи между опорной переменной, возмущением, корректирующей переменной и управляемой переменной используются в максимальной степени с целью реализации системы управления с разомкнутым контуром.
На практике, с целью использования преимуществ обеих структур, часто осуществляется комбинирование замкнутых и разомкнутых контуров управления. При этом установленные связи между опорной переменной, возмущением, корректирующей переменной и управляемой переменной используются в максимальной степени с целью реализации системы управления с разомкнутым контуром.
Отклонения, которые, тем не менее, возникают вследствие изменения параметров или под действием не поддающихся измерению возмущений, корректируются замкнутым контуром управления (см. рис. «Система регулирования с разомкнутым контуром (с регулированием по входному воздействию и возмущению» ).
Каскадное управление
 Часто имеют место структуры, в которых управляемая система разделена на две или более подсистем (например, на фактический процесс и соответствующий исполнительный механизм). В соответствии с этим разделением существуют один или более внутренних блоков управления и один внешний блок управления, которые спроектированы и работают раздельно. Эта процедура известна под названием каскадного управления (см. рис. «Система каскадного регулирования» ).
Часто имеют место структуры, в которых управляемая система разделена на две или более подсистем (например, на фактический процесс и соответствующий исполнительный механизм). В соответствии с этим разделением существуют один или более внутренних блоков управления и один внешний блок управления, которые спроектированы и работают раздельно. Эта процедура известна под названием каскадного управления (см. рис. «Система каскадного регулирования» ).
Проектирование блоков управления (контроллеров) упрощается за счет разделения задачи управления на несколько поддающихся управлению подзадач. Имеют место дополнительные преимущества в отношении динамической характеристики системы, связанные с тем, что возмущения, действующие во внутреннем контуре управления, корректируются там до того, как они начинают влиять на внешний контур управления. Это ускоряет весь процесс управления. Кроме того, это позволяет линеаризовать нелинейные характеристические кривые внутреннего контура.
Каскадное управление применяется во многих автомобильных системах регулирования, например, в системах регулирования электрического тока электрогидравлических исполнительных механизмов или в системах позиционирования исполнительных механизмов с электроприводом.
Техника автоматического управления, элементы передачи
В отношении рабочих характеристик система управления должна отвечать четырем основным требованиям:
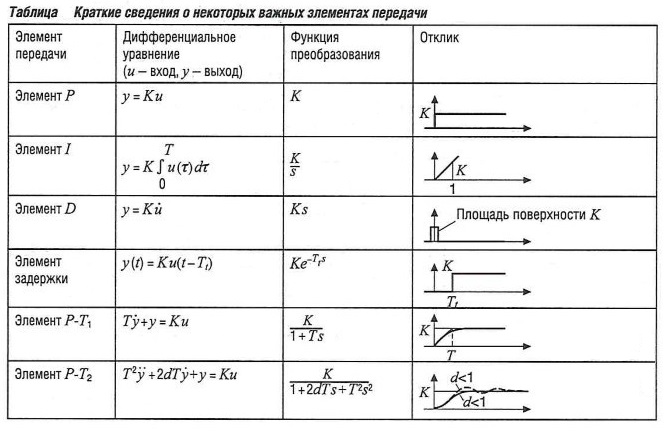
Для того чтобы выполнить эти частично противоречащие друг другу требования, сначала необходимо описать статические и динамические реакции элементов системы управления (самой регулируемой системы и блока управления) с использованием подходящих методов, чтобы иметь возможность проанализировать реакции системы управления и спроектировать блок управления в соответствии с заданными требованиями. Это описание может быть выполнено во временном диапазоне (например, при помощи дифференциальных уравнений) или в определенной полосе частот (например, с использованием функции преобразования или диаграммы Боде).
Многие элементы передачи систем управления можно отнести к конкретным базовым типам, или они могут быть описаны посредством их связей (см. табл. » Краткие сведения о некоторых важных элементах передачи» ).
Задачей синтеза системы управления является разработка для данной регулируемой системы соответствующего блока управления (структуры и параметров элемента передачи), который отвечает вышеуказанным требованиям. Для этой цели существует ряд процедур (например, динамическая коррекция в диаграмме Боде, метод корневого годографа, детализация полюсов, регулятор Риккати в пространстве состояний), которые индивидуально дополняются теми или иными конкретными функциями или шагами проектирования.
Описанная ниже систематизированная процедура показала свою полезность на практике.
Разработка задачи управления
Задача управления
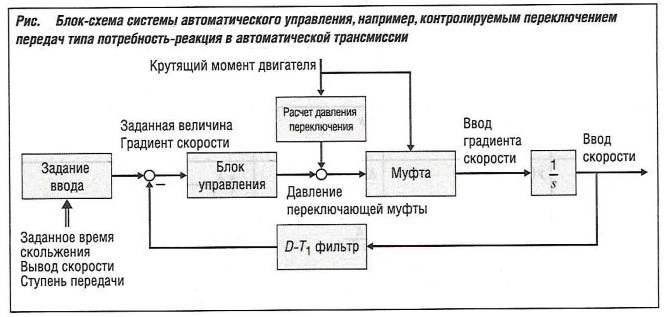
Как правило, задача управления не формулируется специально как таковая, но должна быть выработана на основании требований, предъявляемых к конкретному техническому процессу. Это подразумевает определение задач управления с использованием замкнутых и разомкнутых систем с целью решения вопросов, касающихся того, что должно быть достигнуто при помощи функции управления, и с применением каких переменных будет описываться цель управления. В качестве примера можно привести контролируемое переключение передач типа потребность-реакция в автоматической трансмиссии. С помощью этой функции давление переключающей муфты должно быть во время переключения передачи приведено в соответствие с градиентом скорости таким образом, чтобы время проскальзывания оставалось постоянным при любых условиях работы, даже при изменении тех или иных параметров (например, коэффициента трения).
Система управления и блок-схемы
С учетом этих рассуждений полезно построить диаграмму системы, в которой будут ясно видны основные взаимодействия между электронными, механическими, гидравлическими и пневматическими элементами и всеми датчиками, исполнительными механизмами и системами шин. На основании этой диаграммы можно построить блок схему системы управления, на которой, в свою очередь, будут видны взаимодействия всех функций управления с обратной связью и без обратной связи с регулируемой системой. Функции описываются в форме заголовков, но пока что детально не формулируются. (рис. «Блок-схема системы автоматического управления контролируемым переключением передач типа потребность-реакция в автоматической трансмиссии» ).
При помощи этой диаграммы и блок-схемы можно достичь фундаментального системного понимания оперативных связей в системе. Пока система (механическая часть, периферийные устройства, аппаратура и т.д.) находится на стадии разработки, должна предоставляться возможность оказывать влияние на структурное проектирование системы с использованием общего мехатронного подхода. В качестве примера можно привести процесс заполнения жидкостью рабочего цилиндра гидропривода выключения сцепления. Система должна быть разработана таким образом, чтобы на основе поперечных сечений, объемов и уплотнений было обеспечено ее воспроизводимое поведение при как можно меньшем времени запаздывания.
Регулируемая система
Затем выполняется идентификация регулируемой системы. Это может быть сделано теоретически (посредством моделирования) или практически, например, путем измерения реакции на ступенчатое воздействие или определения частотной характеристики. Рекомендуется использовать оба метода и выполнить соответствующую коррекцию. Идентификация системы представляет собой всеобъемлющий процесс, зависящий от поставленной задачи. Иногда бывает достаточно определить только базовый тип и порядок регулируемой системы.
Разработка блока управления
Блок управления (контроллер) разрабатывается на основе результатов идентификации системы — это главная задача проектирования управляющего устройства. Сначала рекомендуется проработать его теоретически и с использованием методов моделирования. На этом этапе следует определить параметры блока управления. Когда этот этап будет в достаточной степени проработан, следует перейти к испытаниям на реальной регулируемой системе — на стенде или на автомобиле. Обычно в целях достижения дальнейшей оптимизации периодически выполняются рекурсивные шаги.
Критерии проектирования
В дополнение к этой фундаментальной последовательности действий следует учитывать следующие дополнительные критерии.
Цифровое (дискретное) управление
Большинство операций управления на автомобиле осуществляется с использованием микропроцессоров. В этом случае необходимо надлежащим образом определить время выборки, исходя из динамической характеристики системы. При этом необходимо обеспечить условия для того, чтобы все алгоритмы функций могли быть вычислены в течение времени, которое имеется между двумя выборками.
Нелинейность
Во многих случаях простых линейных методов, описанных выше, оказывается недостаточно, поскольку реальные регулируемые системы содержат нелинейные элементы (например, нелинейными являются характеристики регуляторов давления, сцепления и т.д.). В простых случаях, связанных со статическими, непрерывными нелинейностями, они могут быть скомпенсированы посредством дополнительного инвертирующего элемента передачи. В случаях операций регулирования с малыми амплитудами сигнала относительно рабочей точки уравнения, описывающие работу системы могут быть линеаризованы в области этой точки. В противном случае требуется применение более сложных процедур.
Структурные переключения
Многие операции управления с замкнутым контуром сначала инициируются сигналами в разомкнутом контуре управления (например, сначала следует заполнить привод сцепления гидравлической жидкостью, затем подать переключающее давление, затем запустить последовательность переключения передачи). В этом случае при переключении с управления с разомкнутым контуром на управление с замкнутым контуром необходимо обеспечить, чтобы это переключение происходило плавно, и запоминающие устройства (интеграторы элементов I) правильно инициализировались.
Робастность
Система управления, как правило, разрабатывается для «номинальной» регулируемой системы. Однако на практике, в связи с наличием допусков изготовления, реальные регулируемые системы демонстрируют отклонения от номинала. Кроме того, в процессе эксплуатации происходит изменение параметров регулируемой системы, например, вследствие износа диска сцепления или в зависимости от величины других переменных (температуры). Ни в каком из этих случаев не должно иметь место значительное ухудшение качества или стабильности системы управления. Для обеспечения выполнения этих требований существуют процедуры, относящиеся к областям «робастного» или «адаптивного» управления.
Адаптивные блоки управления
Мотивация
Поведение регулируемых систем часто бывает непостоянным. Во многих случаях происходит изменение таких параметров, как постоянные времени и коэффициенты усиления. Может изменяться даже структура системы. Адаптивное регулирование позволяет привести процессы управления с замкнутым и разомкнутым контурами в соответствие с изменяющимся поведением системы. Примеры:
Допуски изготовления
Не все изделия из одной партии на 100% идентичны. Поскольку индивидуальная настройка сложна, система должна автоматически адаптироваться к различным параметрам (например, см. данные для регулировки автоматической трансмиссии).
Износ
Изменение параметров вследствие износа происходит на воспроизводимом (например, увеличение рабочего хода сцепления) или случайном (например, изменение коэффициента трения дисков) уровне. Адаптация позволяет компенсировать эти изменения (например, адаптация к изменениям рабочего хода для автоматических сцеплений).
Зависимость от третьей переменной (например, температуры)
Вязкость рабочих жидкостей сильно зависит от температуры. Поскольку эти колебания могут иметь краткосрочный характер (например, повторяться каждый день), они должны быть скомпенсированы (например, при управлении блокировочной муфтой гидротрансформатора).
Зависимость от рабочей точки
Нелинейные системы часто линеаризуются в области рабочей точки, а затем управление осуществляется линейным контроллером (поведение системы при малой амплитуде сигнала). Адаптация дает возможность учитывать различия в поведении системы в области рабочей точки (например, адаптация давления при чередующихся переключениях передач, производимых автоматической трансмиссией).
Различные требования к решению этих проблем на уровне регулирования с замкнутым контуром вызывают потребность в адаптивных системах, описание и определение которых приведено ниже.
Определение адаптивного управления
Поведение системы управления адаптируется к изменениям свойств регулируемой системы и ее сигналов. Процедура адаптации, как правило, разделяется на два этапа:
Адаптация системы управления без обратной связи
Адаптация осуществляется системой управления с разомкнутым контуром, обращенной к регулируемой системе в прямом направлении. При этом предполагается, что изменение свойств системы может быть зарегистрировано при помощи измерения внешних сигналов z (возмущений), и что зависимость поведения системы управления от этих сигналов известна (см. рис. «Адаптивная система управления без обратной связи» ). Обратная связь с использованием внутренних сигналов контура регулирования для настройки блока управления отсутствует.
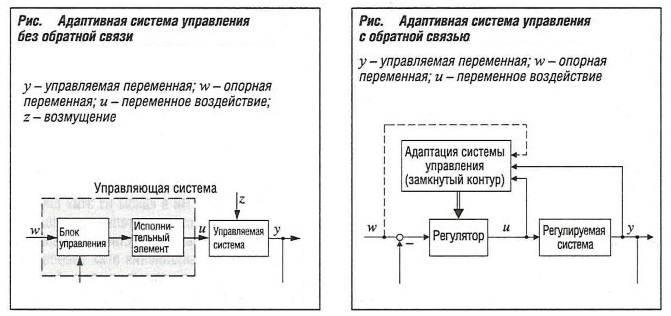
Адаптация системы управления с обратной связью
В случае адаптации с обратной связью изменение свойств системы не может быть прямо зарегистрировано, и должно быть идентифицировано при помощи поддающихся измерению сигналов системы управления. Процесс идентификации может представлять собой простое измерение или иметь более сложный алгоритм оценки моделей динамических процессов. В дополнение к основному контуру управления, в соответствии с законом адаптации, реализуется второй контур обратной связи (см. рис. «Адаптивная система управления с обратной связью» ).
Как правило, первоначально рекомендуется выполнить адаптацию с разомкнутым контуром, т.е. для адаптации используются известные и метрологически регистрируемые взаимосвязи. Преимущества этой прямонаправленной структуры можно сравнить с преимуществами системы управления без обратной связи по сравнению с системой управления с обратной связью. Контур обратной связи, который может вызывать проблемы с устойчивостью системы, в первом случае отсутствует. На практике, в промышленном применении в основном используются адаптивные системы без обратной связи.
Замечания по проектированию
Перед тем как приступить к проектированию системы адаптивного регулирования, следует прояснить следующие вопросы:



