Бесколлекторный мотор с каким KV лучше и для чего? Где больше крутящий момент, а где больше оборотов?
Опции темы
Бесколлекторный мотор с каким KV лучше и для чего? Где больше крутящий момент, а где больше оборотов?
Искал-искал и нифига не нашел.
Подскажите в чем различие моторов по KV.
Думаю насчет замены движка, неохота прогадать. А то возьмешь мотор, а он будет не быстро ехать, зато тяга хорошая. Или наоборот слишком оборотистый.
Сейчас стоит родной HSP 2724kv, регуль Ezrun-s10. Скорость выше 60, тяга нормальная, правда 5км/ч ехать не может.
Ну и зависимость регуля от мотора объясните. Ведь не каждый регуль и мотор совместимы.
Всем заранее спасибо!

Машина то какая? 
Думаю насчет замены движка, неохота прогадать. А то возьмешь мотор, а он будет не быстро ехать, зато тяга хорошая. Или наоборот слишком оборотистый.
Всем заранее спасибо!
Если мне не изменяет память то,чем меньше кв тем тяга больше.
Вроде да т.к. на краулеры ставят примерно от 4000 до 1200. KV это RPM/volt если я правильно понимаю.
а скорость на 2080 от 4800 примерно на сколько упадет?
Да, бронтозавр работает на 3s 11.1v, 35С.
KV мотора можно сравнить с передаточным отношением, чем больше KV тем выше обороты, но ниже крутящий момент и наоборот, этот параметр нужно выбирать исходя из условий трассы, потребностей самого пилота, ну и само собой модели. Кто-то хочет большей приёмистости, ктото любить большую скорость. Да и не забывайте что пересчитав обороты двигателя при данной батареи, двигатель выдаст их без нагрузки на валу, значит на модели он их никогда не достигнет. Чем ниже KV тем ближе мотор к этим максимальным оборотам с нагрузкой. Это сугубо моё мнение.
Всем добрый день, давненько читаю Ваш форум, много полезной информации для себя подчерпнул, являюсь обладателем ревы с коллекторниками, они живы и катаются приемлемо, но вот решил сделать себе подарок и заказал бесколлекторную систему и комплектик к ней, подскажите что думаете по поводу такого приобретения:
Turnigy Brushless 1/8 Scale Car Power System 1965Kv/150A
Turnigy nano-tech 7600mah 2S 40
Моторы для моделей. Немного теории. Часть 1

Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor).
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе.
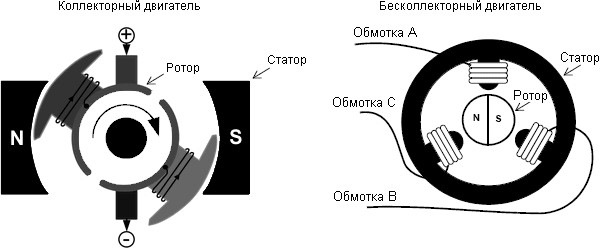
Давайте сначала узнаем, как работает коллекторный двигатель.
Чтобы узнать, почему бесколлекторные двигатели настолько эффективны и имеют высокую мощность, необходимо знать, как работает стандартный коллекторный мотор.
Обычные коллекторные электродвигатели, имеют всего два провода (положительный и отрицательный), которыми двигатель подключается к регулятору скорости. Внутри корпуса двигателя можно увидеть два изогнутых постоянных магнита, а по центру установлен вал с якорем, на котором намотаны обмотки из медной проволоки. С одной стороны вала якоря устанавливается моторная шестерня, с другой стороны вала расположен так называемый коллектор из медных пластин, через который с помощью угольных щеток ток подается к обмоткам якоря.
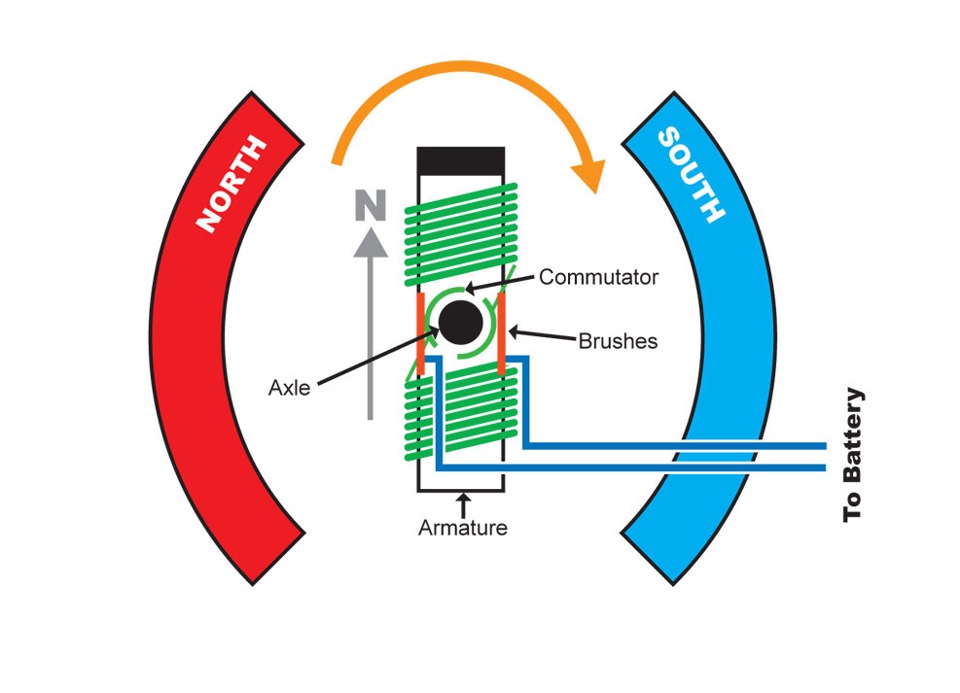
Две угольные щетки постоянно скользят по вращающемуся медному коллектору. Как вы можете видеть на рисунке выше, напряжение по проводам через щетки и коллектор поступает к обмоткам якоря, возникает электромагнитное поле, которое взаимодействует с постоянными магнитами статора и заставляет якорь вращаться.
Как начинает вращаться стандартный коллекторный двигатель.
Когда на обмотки якоря поочередно поступает постоянный электрический ток, в них возникает электромагнитное поле, которое с одной стороны имеет «северный» а с другой «южный» полюс. Поскольку «северный» полюс любого магнита автоматически отталкиваются от «северного» полюса другого магнита, электромагнитное поле одной из обмоток якоря, взаимодействуя с полюсами постоянных магнитов статора, заставляет якорь вращаться. Через коллектор и щетки ток поступает на следующую обмотку якоря, что заставляет якорь вместе с валом мотора продолжать вращение, и так до тех пор, пока к мотору подается напряжение. Как правило, якорь коллекторного мотора имеет три обмотки (три полюса) — это не позволяет двигателю застревать в одном положении.
Недостатки коллекторных двигателей выявляются, когда нужно получить огромное количество оборотов от них. Поскольку щетки должны постоянно находиться в контакте с коллектором, в месте их соприкосновения возникает трение, которое значительно увеличивается, особенно на высоких оборотах. Любой дефект коллектора приводит к значительному износу щеток и нарушению контакта, что в свою очередь снижает эффективность мотора. Именно поэтому серьезные гонщики протачивают и полируют коллектор двигателя и меняют щетки почти после каждого заезда. Коллекторный узел стандартного мотора так же является источником радиопомех и требует особого внимания и обслуживания.
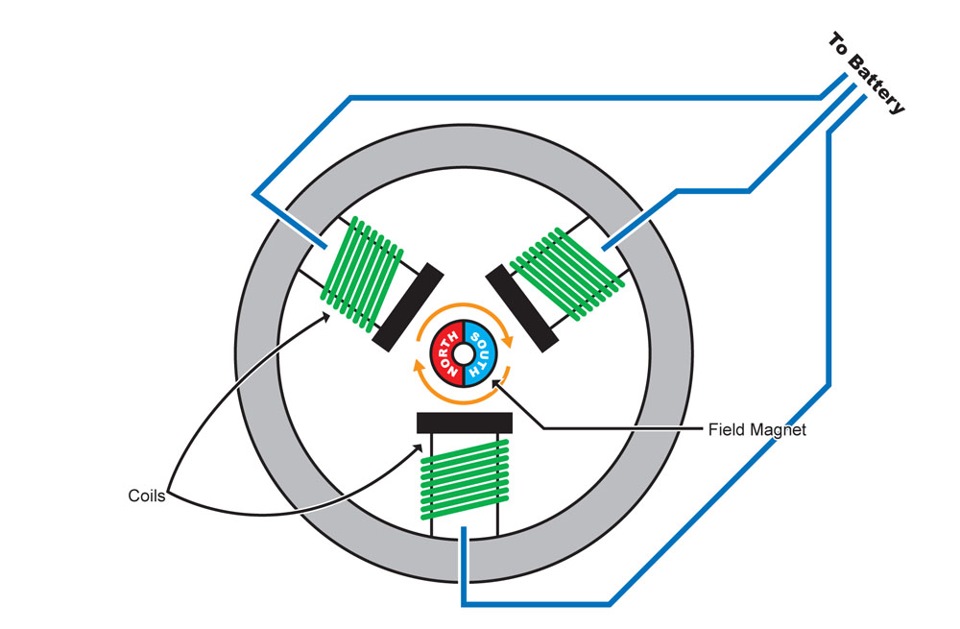
Теперь посмотрим, как работает бесколлекторный двигатель.
Основной особенностью конструкции бесколлекторного двигателя является то, что он по принципу работы похож на коллекторный мотор, но все устроено как бы «наизнанку», и в нем отсутствуют коллектор и щетки. Постоянные магниты, которые в коллекторном моторе установлены на неподвижном статоре, у бесколлекторного мотора расположены вокруг вала, и этот узел называется ротор. Проволочные обмотки бесколлекторного мотора размещены вокруг ротора и имеют несколько различных магнитных полюсов. Датчиковые бесколлекторные моторы имеют на роторе сенсор, который посылает сигналы о положении ротора в процессор электронного регулятора скорости.
Из-за отсутствия коллектора и щеток в бесколлекторном моторе нет изнашивающихся деталей, кроме шарикоподшипников ротора, а это автоматически делает его более эффективным и надежным. Наличие сенсора контроля вращения ротора также значительно повышает эффективность. У коллекторных двигателей не возникает искрения щеток, что резко снижает возникновение помех, а отсутствие узлов с повышенным трением благоприятно сказывается на температуре работающего мотора, что так же повышает его эффективность.
Единственный возможный недостаток бесколлекторной системы – это несколько более высокая стоимость, однако каждый, кто испытал высокую мощность бесколлекторной системы, почувствовал прелесть отсутствия необходимости периодической замены щеток, пружин, коллекторов и якорей, тот быстро оценит общую экономию и не вернется к коллекторным моторам … никогда!
Помимо базовых размеров и различных параметров, бесколлекторные двигатели могут подразделяться по типу: с датчиком и без датчика. Двигатель с датчиком используют очень маленький сенсор на роторе и кроме трех толстых кабелей, по которому мотор получает питание, имеют дополнительный шлейф из тонких проводов, которые соединяют двигатель с регулятором скорости. Дополнительные провода передают информацию с датчика о положении ротора сотни раз в секунду. Эта информация обрабатывается электронным регулятором скорости, что позволяет мотору работать плавно и эффективно, насколько это возможно. Такие моторы используют профессиональные гонщики, однако такие двигатели намного дороже и сложнее в использовании.
Бездатчиковая бесколлекторная система, как можно догадаться, не имеет датчиков и дополнительных проводов, а ротор таких двигателей вращается без точной регистрации его положения и оборотов регулятором скорости. Это позволяет сделать двигатель и регулятор скорости проще в изготовлении, проще в установке и в целом дешевле. Бездатчиковые системы способны обеспечить такую же мощность, как датчиковые, просто с чуть-чуть меньшей точностью, а это идеальное решение для любителей и начинающих спортсменов.
Топ 5 лучших моторов для мини коптеров
Константа скорости (KV)
Константа скорости или постоянная скорость (KV) это очень важный параметр при выборе бесколлекторного мотора для квадрокоптера. Она обозначает теоретическое увеличение оборотов вала мотора без нагрузки при увеличение напряжения на 1 Вольт. Например, если запитать мотор 2300 KV батареей 3S на 12,6В, то вал буде крутиться со скоростью 28980 оборотов в минуту (2300 х 12,6), без лопастей. Но это приблизительная величина и она всегда указана на маркировке мотора.
При установке лопастей на мотор, скорость его вращения, конечно же сократиться, из-за сопротивления воздуха. Чем выше KV, тем быстрее этот электромотор может раскручивать лопасть, но вот низкий KV означает, что у мотора большая тяга. Так что обычно большие лопасти мы ставим на моторы с низким KV, а короткие на большие KV.
Если вы попытаетесь установить на электромотор с высоким KV большие лопасти, то мотор будет пытаться раскрутить их как можно быстрее, будет сжирать много энергии, генерирую при этом излишнее количество тепла. В итоге мотор можно легко спалить.
Суперлегкий — R4 2205 2700KV
Для 6S я пробовал разные моторы от 1600KV до 2600KV, и всё ещё думаю, чем ниже KV, тем легче настроить коптер (1600-200KV).
BrotherHobby R3 2206 1720KV отлично показали себя на моем легком коптере с шестибаночным аккумулятором, плавные и отзывчивые. И очень эффективные! Кое-кто использует их на 7″ коптерах с 4S аккумуляторами и получает отличный результат.
Купить: Banggood | RDQ | Обзор
У BrotherHobby Returner R4 подшипники EZO, благодаря этому он долговечнее более старой версии. Отличный дизайн и выбор материалов, в результате Returner R4 весит всего 25 грамм! Прекрасно подойдет для сверхлегких коптеров.

Размер рамы =gt; Размер лопастей =gt; Размер мотора
Зная размер рамы, мы можем примерно определиться с размером электромотора, который нам нужен. А все это потому, что размер рамы ограничивает размер лопастей, а для каждого размера лопасти и нужно подбирать мотор (скорость вращение, тяга, см. выше). И вот тут как раз вступает значение KV. Вы должны быть уверены, что у мотора будет достаточно тяги, чтобы крутить лопасть, а способность крутить лопасть зависит от размера статора. Короче, больше статор, больше KV, больше потребление тока.
В таблице ниже можно посмотреть зависимость размера рамы, размера лопастей, размера мотора и значения его KV.
Так же важно понимать, что вольтаж оказывает большое влияние на выбор как мотора так и лопастей. При большом вольтаже мотор будет стараться крутиться сильнее и от сюда будет потреблять больше энергии.
Дополнительные факторы, влияющие на эксплуатационные характеристики мотора
При выборе электромотора для квадрокоптера обязательно проверяйте его технические характеристики. Учитывайте все то, что мы обговорили выше. Вот, к примеру, модель Micro Brushless Outrunner 18-11 2000KV.
Предположим, вы уже определились с размером мотора и уже подобрали несколько моделей, из которых и выбираете. Чтобы выбрать лучший мотор, нужно учитывать следующие факторы:
Подумайте, что вы хотите в итоге получить и уже на основе этого делайте окончательный выбор.
Тяга и мощность
Первое, на что смотрят большинство покупателей электромоторов — это тяга. Чем больше тяга, тем больше ускорение, но тут надо еще смотреть на эффективность. Возможно эта тяга будет для вас избыточна, а мощные мотор очень прожорлив и ваша батарея в мгновение ока будет высаживаться в ноль. Если ваш квадрокоптер поглощает большое количество тока при большом ускорении, то ваша батарея должна быть способна выдавать такие показатели, а иначе вам обеспечен перегрев батареи и она еще может вздуться из-за этого.
Но при выборе мотора нельзя ограничиваться только мощностью и тягой. Есть и другие важные параметры.
Вес мотора

Вес мотора очень часто игнорируют неопытные сборщики квадрокоптеров, но это немаловажные фактор. Т.к. моторы устанавливаются по углам рамы, то соответственно они оказывают большое влияние на отзывчивость дрона при управлении. Чем тяжелее мотор тем больше момент инерции квадрокоптера и тем сложнее изменяется угловая скорость в полете.
У самого мотора есть свой момент инерции. И опять, чем тяжелее мотор, тем больше ему самому нужно тяги и времени, чтобы раскрутиться до необходимых оборотов. Все это в итоге выливается в тормознутость аппарата, в его валкость, плохую отзывчивость и не точное управление. Для акробатических полетов и гонок, вес мотора играет одну из ключевых ролей.
Эффективность
Эффективность мотора обычно измеряется в граммах на ват (тяга/мощность). Важно оценивать эффективность на всем диапазоне газа. Некоторые моторы эффективны при низком газе и теряют эффективность, потребляя излишне много энергии при своих максимальных оборотах. Но неэффективный мотор не только сильно съедает и так ограниченную энергию в полете, тем самым сокращая его продолжительность, он также способствует просадкам напряжения. Неэффективный мотор может либо не выдавать необходимой тяги или потреблять излишний ток.
Не все характеристики той или иной модели электромотора производитель официально публикует, и кроме как на собственных тестах их нигде найти не удастся.
Тяга — это на сколько быстро мотор может увеличивать/изменять скорость вращения. Это влияет на точность управления и отзывчивость квадрокоптера во время полета. Большая тяга дает мгновенный отклик, т.к. скорость вращения меняется так же мгновенно. Большая тяга, так же позволяет ставить лопасти побольше (если рама конечно позволяет), правда в ущерб батарее.
Если же ставить тяжелые лопасти на мотор с низкой тягой, то он вообще не будет способен раскрутить их до нужного значения. Но у высокотяговых моторов есть и свой недостаток — это вибрация, которую очень сложно устранить. Из-за повышенной реакции на команды возможны излишние ошибку в управлении и рыскание квадрокоптера
Время отклика — зависит напрямую от тяги, чем ее больше тем лучше отклик. Для оценки времени отклика можно посмотреть на сколько быстро мотор наберет обороты с 0 до максимального значения. И еще время отклика сильно зависит от лопастей.
Температура — магниты в мотора быстрее размагничиваются при высоких температурах, отсюда падение характеристик летательного аппарата. Чем холоднее мотор, тем он дольше проживет.
Вибрация — Если мотор плохо сбалансирован или плохого качества сборки, это приведет к повышенной вибрации во время полета. Поврежденные или несбалансированные лопасти так же ведут к излишней вибрации.
Определяемся с размером мотора
2204 и 2205 отлично подойдут для сверхлегких коптеров (сухой вес, без аккумулятора менее 250 грамм), но их мощности не хватит для вращения больших и тяжелых винтов.
2206 и 2305 я бы отнес к той же категории, т.к. размер статора почти такой же. Их можно использовать в более тяжелых моделях на 4S: 250 — 300 грамм. Моторы этих размеров очень часто ставят в модели с 5 и 6 баночными аккумуляторами (если они поддерживают такое напряжение).
2306 и 2207 подойдут для совершенно разных пропов и для более тяжелых моделей (более трехсот грамм без аккумулятора). В общем и целом, 2207 обычно более мощные и имеют более линейную кривую газа, а 2306 — более плавные и больше подходят для фристайла (смотри подробное сравнение 2207 и 2306).

Кто-то ставит даже 1407 на сверхлегкие 5″ коптеры. Лично я считаю, что это не очень хорошая идея, т.к. у них не хватает крутящего момента для 5″ пропов, лучше использовать легкие 4″.
Важно понимать, что кроме размера мотора и KV есть и другие критерии выбора.
Летные качества также определяются и качеством мотора и его дизайном (расстояние между ротором и статором, сила магнитов, толщиной пластин статора, обмотками и т.д.). Два мотора одного размера, но от разных производителей скорее всего будет иметь разные характеристики.
Мотор с каким KV мне подойдет?
Обычно у каждого мотора для 5″ винтов есть 2-3 разновидности с разным KV, от 2300 до 2600 kv. С моей точки зрения, отличие только в числе витков статора. Остальное железо должно быть тем же самым.
Ответ на вопрос — это всего лишь личные предпочтения и размер винта. Лично я для фристайла предпочитаю использовать 2300kv-2500kv моторы с 5″ винтами, но знаю несколько серьезных FPV гонщиков, которые выбирают моторы 2600kv для своих коптеров с 5″ винтами. Если вы знаете, что делаете, а потребляемый ток не убьет электронику и аккумуляторы — то можно использовать любые моторы.
Увеличение kv не сделает из вас более быстрого пилота, на некоторых гонках самые быстрые круги были пройдены на моторах с 2300kv. Нужно просто настроить всё правильно, подобрать подходящие винты, удерживать вес коптера на оптимальном значении и т.д.
Топовые моторы прошлого
За эти моторы голосовали в прошлом. В плане характеристик они все еще довольно хороши и их тоже стоить учесть при сборке коптера.
RCX RS2206 v3
Новая редакция V3 практически идентична V2, за исключением формы колокола, препятствующей соскальзыванию магнитов.
Некоторые другие особенности моторов для квадрокоптеров

Так много переменных, которые могут повлиять на итоговые характеристики мотора. К примеру, моторы с одним и тем же размером статора, одинаковым KV имеют разную тягу и потребление тока при одинаковых лопастях. И все это из-за различий в конструкции (разные магниты, обмотка, корпус, вал и т.п.). Следующие особенности могут неким образом повлиять на эксплуатационные качества электромотора и даже могут изменить его характеристики.
Полый вал
Это позволяет использовать более прочные и тяжелые металлы или наоборот понижает вес мотора.
Типы магнитов
Магниты, которые устанавливаются в бесколлекторные электромоторы обозначаются как N52, N54 и т.д. Чем выше число, тем больше сила магнитного поля и тем больше тяга и лучше отзывчивость мотора.
Толщина статора
Чем тоньше, тем лучше, тем больше мощности, меньше генерируется тепла и лучше эффективность.
Толщина проволоки в обмотке вокруг статора играет большую роль. Толстая обмотка обладает меньшим сопротивлением, что позволяет пропускать больше тока. А тонкая обмотка приводит к меньшей пропускной способности и большему сопротивлению. Однако толстая обмотка требует больше места, что означает меньшее количество витков и от сюда меньше противоэлектродвижущая сила (оборотная ЭДС).
Воздушный зазор
Это расстояние между постоянными магнитами и статором. Магнитное поле уменьшается нелинейно с расстоянием и сократив его можно заметно увеличить мощность мотора. Но меньший зазор дает не только больше мощности и энергоэффективности, но и улучшает тягу и отзывчивость.
Электромоторы с дугообразными магнитами лучше, их можно расположить ближе к статору и они сплошные, без пропусков.

Обмотка в моторе определяет его мощность и потребление тока. Меньше обмотка = меньше сопротивление = больше тока может пройти = больше частота оборотов. Вот почему моторы с большим значением KV имеют обмотку в статоре меньше.
Но у этого есть и обратная сторона. При меньшей обмотке у нас будет меньше сила магнитного поля и от сюда меньше тяги. И еще, чем больше проходит тока через обмотку, тем больше она нагревается и тем меньше общая эффективность.
Чтобы найти компромисс производители пошли путем увеличения обмотки за счет использования толстой медной проволоки. Это уменьшит сопротивление в обмотке, увеличит мощность без ущерба в скорости и тяге. А чем больше сечение проволоки, тем больше может пройти тока без чрезмерного нагрева.
Но вот чем толще проволока и больше обмотка, тем тяжелее сам мотор. Кроме того, обмотка занимает в корпусе мотора уже много места. И вот поэтому мощные моторы должны быть большими.
Для крепление колокола мотора на месте используется несколько типов фиксаторов: C-clip, E-clip и болт. У каждого типа есть свои плюсы и минусы и точно сказать какой из них лучший я затрудняюсь.
Вообще, крепление на болту более удобно для последующего обслуживания мотора, колокол гораздо легче снять и потом снова одеть. Но тут есть риск перетянуть болт и заклинить его в валу, что может привести к затруднению при вращении. Бывали случаи когда болт самораскручивался и колокол улетал. Но и C-clip тоже страдает от подобных проблем самопроизвольного расцепления.
Классический корпус электромотора предполагает полностью закрытую конструкцию. Но сейчас замечена тенденция на открытый низ. И тут и там есть свои положительные и отрицательные моменты.

Закрытый (слева) и открытый (справа) низ электромотора

Конструкция с закрытым низом предполагает большую прочность, а вот открытый низ — меньше веса, легкость. Открытый мотор легче чистить от грязи, в отличии от закрытого, в котором грязь может набиваться со временем, мешая ему работать.
С открытым мотором лучше видно как сильно затягивать болты при его креплении на раму. А то бывали случаи когда их перетягивали или болты были слишком длинными и ими повреждали обмотку.
Итак, теперь вы знаете основы работы и из чего он состоит, теперь узнаем, как выбрать мотор для дрона.
Первое, что вы должны выбрать, это размер двигателя, который вы будете использовать. К счастью, большинство производителей в нашем хобби установили стандартную схему именования своих двигателей. Обычно это 4-значное число, которое выглядит примерно как «2205». Первые две цифры этого числа — это диаметр (в мм) статора, а второй — это высота (также в мм).
Вот общие размеры двигателей для квадрокоптеров:
Что такое бесколлекторный двигатель?
Типы моторов?
Двигатели/моторы в мультироторных аппаратах бывают двух типов:
Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе (вращающейся части), а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в этой статье.
Несмотря на то, что применяться БК-моторы начали сравнительно недавно, сама идея их устройства появилась достаточно давно. Однако именно появление транзисторных ключей и мощных неодимовых магнитов сделало возможным их коммерческое использование.

Устройство БК — моторов
Конструкция бесколлекторного двигателя состоит из ротора на котором закреплены магниты и статора на котором располагаются обмотки. Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.


В мультироторных системах чаще применяется схема Outrunner, поскольку она позволяет получать наибольший крутящий момент.
Плюсы и минусы БК — двигателей
Плюсы:
Минусы:
Из минусов можно отметить только невозможность применения данных двигателей без ESC (регуляторы скорости вращения). Это несколько усложняет конструкцию и делает БК-двигатели дороже коллекторных. Однако если сложность конструкции является приоритетным параметром, то существуют БК-двигатели с встроенными регуляторами скорости.

Как выбрать двигатели для коптера?
При выборе бесколлекторных двигателей в первую очередь следует обратить внимание на следующие характеристики:



