Режекторный фильтр
Режекторный фильтр
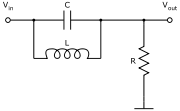

Заграждающий фильтр, предназначенный для подавления одной определённой частоты, называется узкополосным заграждающим фильтром или фильтром-пробкой (англ. notch filter ).
Ссылки
См. также
Смотреть что такое «Режекторный фильтр» в других словарях:
режекторный фильтр — Ндп. полосно заграждающий фильтр Электрический частотный фильтр, имеющий полосу задерживания, расположенную между двумя заданными полосами пропускания. [ГОСТ 24375 80] Недопустимые, нерекомендуемые полосно заграждающий фильтр Тематики радиосвязь… … Справочник технического переводчика
Режекторный фильтр — 260. Режекторный фильтр Ндп. Полосно заграждающий фильтр Источник: ГОСТ 24375 80: Радиосвязь. Термины и определения оригинал документа Смотри также родственные термины: 58. Режекторный фильтр аппаратуры системы передачи с ЧРК Режекторный фильт … Словарь-справочник терминов нормативно-технической документации
РЕЖЕКТОРНЫЙ ФИЛЬТР — то же, что заграждающий фильтр … Большой энциклопедический политехнический словарь
Режекторный фильтр — 1. Электрический частотный фильтр, имеющий полосу задерживания, расположенную между двумя заданными полосами пропускания Употребляется в документе: ГОСТ 24375 80 … Телекоммуникационный словарь
режекторный фильтр аппаратуры системы передачи с ЧРК — режекторный фильтр Ндп. заградительный фильтр Фильтр аппаратуры системы передачи с ЧРК, полоса задерживания которого расположена по диапазону частот между двумя полосами пропускания. [ГОСТ 22832 77] Недопустимые, нерекомендуемые заградительный… … Справочник технического переводчика
режекторный фильтр подавления несущей — фильтр подавления помех в цепях питания — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом Синонимы фильтр подавления помех в цепях питания EN interference… … Справочник технического переводчика
Режекторный фильтр аппаратуры системы передачи с ЧРК — 58. Режекторный фильтр аппаратуры системы передачи с ЧРК Режекторный фильтр Ндп. Заградительный фильтр D. Bandsperre Е. Bandstop filter F. Fiitre coup bande Фильтр аппаратуры системы передачи с ЧРК, полоса задерживания которого расположена по… … Словарь-справочник терминов нормативно-технической документации
режекторный фильтр для звукового сигнала соседнего канала — užtvarinis gretimojo kanalo garso signalo filtras statusas T sritis radioelektronika atitikmenys: angl. adjacent channel sound rejector vok. Nachbarkanaltonfalle, f rus. режекторный фильтр для звукового сигнала соседнего канала, m pranc. piège de … Radioelektronikos terminų žodynas
Режекторный фильтр аппаратуры системы передачи с ЧРК — 1. Фильтр аппаратуры системы передачи с ЧРК, полоса задерживания которого расположена по диапазону частот между двумя полосами пропускания Употребляется в документе: ГОСТ 22832 77 Аппаратура систем передачи с частотным разделением каналов.… … Телекоммуникационный словарь
Что такое notch filter
«NOTCH»- фильтр — узкополосный режекторный /вырезающий/ фильтр
«CW»- фильтр — узкополосный телеграфный /выделяющий/ фильтр
Схема фильтра была опубликована еще в первом номере журнала «Радио- Дизайн» за 1993г., но вначале не привлекла моего внимания. Недавно по просьбе товарища я изготовил фильтр и был приятно удивлен. При его простоте и дешевизне фильтр работает очень хорошо!
При отработке конструкции фильтра /в статье не приводится/ у меня получилось несколько вариантов, незначительно отличающихся способами коммутации и печатными платами. Мне настолько хочется, чтобы вы, друзья, изготовили этот фильтр, что не счел за труд «нарисовать» все варианты. Чтобы не возникло путаниц и недоразумений, для каждого варианта приведена конкретная принципиальная схема.
В фильтре применены два сдвоенных операционных усилителя К157УД2, выбор которых определили высокие параметры, доступность и невысокая стоимость. Номиналы элементов в частотозадающих цепях могут быть изменены в зависимости от требуемого диапазона перестройки и наличия деталей. Нижнюю и верхнюю резонансные частоты можно рассчитать по формулам:


/см. варианты 1-3/ Где:
F-в КГц,
R-в Ком,
C-в мкф.
Следует учесть, что частоты ниже 300 Гц и выше 3000 Гц ослабляются в фильтре основной селекции /ЭМФ, КФ/, поэтому слишком большое перекрытие по частоте лишь затруднит точную настройку на резонанс. Если на выходе предшествующего и на входе последующего фильтру каскадов установлены неполярные конденсаторы, то на плате конденсаторы С1 и С7 можно исключить, впаяв вместо них перемычки. Платы изготовляются из одностороннего стеклотекстолита. Резисторы — МЛТ-0,125. Конденсаторы — КМ и К50-35. Конденсаторы СЗ и С5 нужно подобрать с одинаковой емкостью!
В этом варианте всего два органа управления: переменный резистор «Частота» и тумблер «Вкл.» При желании для экономии места на панели можно связать механически ось переменного резистора с контактами включения фильтра. Подстроечным резистором R7 устанавливается оптимальная ширина полосы режекции фильтра. Но, если имеется возможность, резистор R7 лучше установить на лицевой панели, так как, это расширит сервисные возможности фильтра.
Следует заметить, что в вариантах 2 и 3 можно обойтись без разъема, впаяв проводники жгута в отверстия на плате. Рекомендую устанавливать микросхемы на панельках или хотя-бы проверять их перед впаиванием, так как, в последнее время на рынке продается много бракованных деталей, а «рвать» потом дорожки будет очень жаль.
С.И. Попов (RA6CS),
353241, Россия, п. Афипский,
Краснодарского края,
ул. Пушкина, 140, кв33.
PS: Есть очень интересное предложение — «ярым» телеграфистам изготовить две платы и включить их последовательно. Тогда одним фильтром можно будет выделить телеграфный сигнал, а другим — подавить помеху от соседней радиостанции. Платы можно установить в два этажа, соединив их так, чтобы один фильтр работал в качестве телеграфного, а другой — режекторного.
FPV Квадрокоптер: Фильтрация в Betaflight

(Betaflight 4.1, на новых настройках еще не снимал)
На днях, я все таки решил обновиться до Betaflight 4.2 и все вокруг советуют включить фильтрацию с двухсторонним DShot. К слову она была и в 4.1.
Для начала, давайте немного разберемся, что такое фильтрация и зачем она нужна.
По умолчанию Betaflight задает общие настройки фильтрации подходящие для большинства моделей. Но для достижения наибольшего перфоманса, фильтрация может быть настроена по другому, так как ее может быть излишне или не достаточно для потрепанного квадрокоптера.
MEMS Гироскоп
У каждого квадрокоптера есть FC — Flight Controller, который по сути является мозгами. На этих контроллерах так же присутствует цифровой чип, который часто называют gyro — гироскоп. Это сенсор, который чувствует движение. Он содержит в себе маленькое электро-механическое устройство, которое так и называется — MEMS (Micro Electro Mechanical System).
Внутри этого устройства расположены механически резонирующие «вилки». Эти вилки, расположены по всем трем осям (pitch, roll, yaw) и двигаясь (механическая часть) создают флуктуации вольтажа (электрическая часть).
Флуктуации (колебания) вольтажа, по факту являются аналоговыми волнами, которые преобразуются в цифровую информацию для обработки полетным контроллером. Когда мы говорим 8k gyro, это значит, что 8000 раз в секунду, аналоговый сигнал превращается в цифровой и обрабатывается контроллером, прошивкой, в данном случае Betaflight.
Шум — это термин, который мы часто слышим, но, что это такое? Как правило, мы сразу же представляем звуковой шум или шумную обстановку в очередном 23 этажном муравейнике.
Гироскоп и PID контроллер сталкиваются с похожей проблемой. Так как гироскоп расположен на полетном контролере, который прикреплен к раме, он испытывает шум. Шум может исходить от: моторов, пропеллеров, ветра на скорость, общий шум от рамы, электроники etc.
PID Controller
PID Controller — это такая система которая корректирует позицию квадрокоптера согласно стикам (вашему управлению) или заданного положения (ну, что бы его не колбасило). PID настраивается за счет 3х параметров — P, I и D. К сожалению в этой статье мы не будем детально рассматривать настройку PID. Если вы пилот, то уже знаете, а если новичок, но на эту тему будет отдельная статья.
Эта система хорошо работает, когда количество шумов минимальна, иначе мы можем столкнуться с такими проблемами как осцилляция (вибрации) или перегрев моторов.
D term в PID контроллере имеет особенно отношение к шуму. D сглаживает быстрые движения, но вычисление D в PID контроллере значительно усиливает шум в сигнале. Это означает, что шум от гироскопа существенно усиливается значением D term и поэтому мы фильтруем в двух местах — гироскоп и D.
В качестве примера такого приумножения покажу вам такие вот логи:
Первый график — гироскоп
Второй график — PID
Третий — моторы
(это нормальные пропеллеры, с немного уменьшенной фильтрацией)
(Как видите вибрации от плохих пропеллеров усиливаются на этапе PID контроллера, что ведет к излишнему напрягу моторов, их буквально колбасит)
Фильтрация
Процесс фильтрации заключается в удалении лишнего шума из сигнала от гироскопа. Но какую часть сигнала от гироскопа мы хотим оставить, а какую отфильтровать?
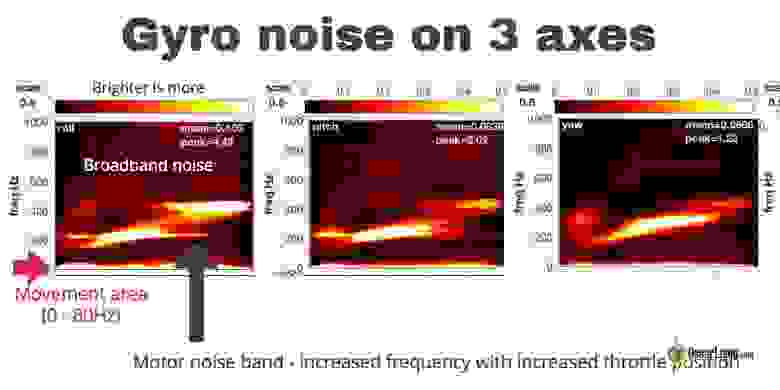
Честно не могу вам в красках рассказать, но так сложилось, что в бетафлайт, шум, а точней вибрации измеряются в Hz. 1Hz — одна ротация в секунду. Делается это как для простоты визуализации и работы с этими переменными. А еще, турбулентность технически называется «rate of change of rotation» — частота изменения ротации.
Скорость движения квадрокоптера лежит в районе 0-30 Hz. Выше 30Hz до 80Hz у нас находится пропвош (propwash), когда квадрокоптер трясет от турбулентности в собственных потоках. Информация в пределах 0 — 80Hz важна для PID контроллера, поэтому ее мы трогать не будем.
С помощью PIDtoolbox можно рисовать вот такие карты:
Low Pass
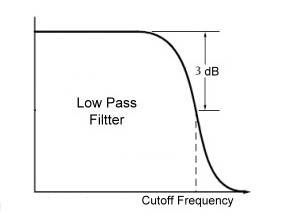
Как показывает предыдущий график — сигнал от гироскопа содержит информацию от 0 Гц до 1000 Гц, но нас интересует только диапазон 0-80 Гц, поскольку это фактическое движение квадрокоптера, о котором должен знать PID-контроллер. Таким образом, нам нужно решение для фильтрации, чтобы позволить низким частотам проходить через PID-контроллер, в то же время ослабляя высокие частоты, и для этого мы можем использовать фильтр Low Pass (Низких частот).
Фильтры нижних частот пропускают низкочастотный сигнал и ослабляют высокие частоты, которые в основном являются просто шумом.
Устанавливается частота среза, и контроллер просто уменьшает сигналы выше этой частоты. Кривая затухания позволяет не срезать все под чистую, а чем выше частота шума, тем сильней происходит его затухание, плавно.
Часто пилоты допускают ошибку устанавливая такой фильтр на той же частоте, что и видимый шум. Например на 200Hz. Поскольку фильтр плавно ослабляет шум, установка такого фильтра не даст особого результата. Фильтр стоит устанавливать на более низкие частоты. Возможно, даже на 80Hz.
Чем ниже вы устанавливаете такой фильтр, тем больше фильтрации происходит
Устанавливая фильтрацию, следует помнить об одной простой вещи. Чем больше фильтрации тем больше задержка. Понятное дело, что она в миллисекундах и не значительная, но для PID-контроллера это критично. Так как он начнет реагировать на события позже, а это значит, что он будет пытаться выровнять квадракоптер в прошлом 🙂
Notch фильтр
Notch переводится как зарубка, собственно это примерно так и выглядит:
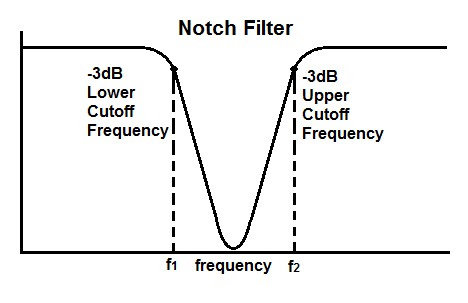
Фильтра откидывают часть шума ниже и часть шума выше. Начиная с Betaflight 3.1 эти фильтры являются динамическими, и подстраиваются под различный шум.
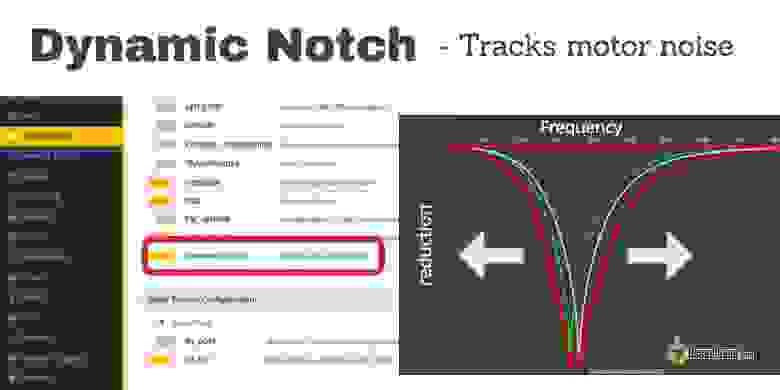
Фильтра используются в связке с Low Pass фильтрами, но используются уже для фильтрации шумов от моторов, которые находятся выше.
D term фильтрация
Как было сказано выше, D способен приумножать шумы от гироскопа, поэтому в Betaflight есть фильтрация D. Ниже на грификах видно уровень шума до фильтрации и после.
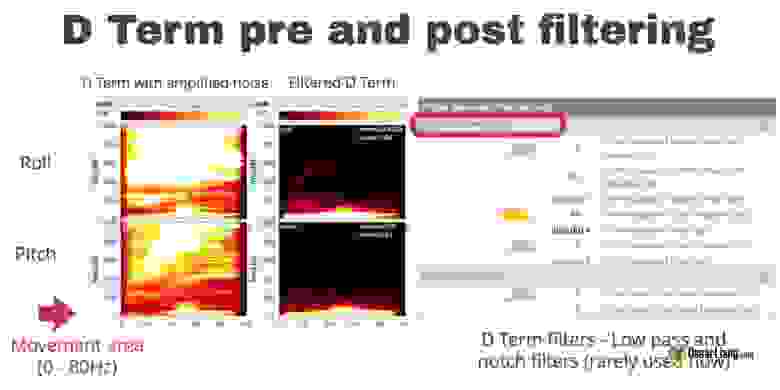
В сообществе нет четкого понимания, стоит ли сильно фильтровать D или нет. Но есть правило горячих моторов, чем меньше фильтрация и чем выше D, тем сильней они греются и могут даже сгореть. Но и в обратную сторону мы получаем задержку.
RPM Filter
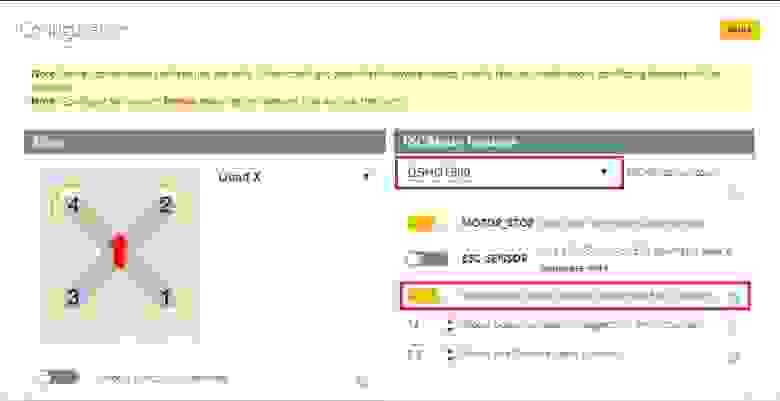
Так вот, собственно, что новое я стал использовать, так это RPM фильтрацию. Она работает за счет двухстороннего протокола DSHOT который позволяет полетному контроллеру узнать точное количество оборотов конкретного мотора. И уже на основании этих данных применяется фильтрация.
(Ваш ESC должен поддерживать двухсторонний DHSOT)
Прошивка на ESC, от 3.7
Если моторы греются, то это проблема. Горячие моторы могут быть признаком того, что на моторы попадает много шума и они пытаются реагировать на вибрации так часто, что начинает выделяться тепло.
Греться моторы могут по ряду причин, старая рама, погнутые колокола у моторов, нарушенная балансировка, лишние прибомбасы на вашем коптере.
Конечно лучше иметь, как говорят clean build, и что бы все было новое, но можно сперва попробовать настроить фильтрацию.
Для начала можно начать с увеличения фильтрации D, делать шаги в 20 Hz. Проверяйте температуру после каждого такого шага и найдите свой оптимальный диапазон.
А искать его следует между температурой моторов и вибрациями. Как было сказано выше, хоть и фильтрация призвана уменьшить количество шума, она может накладывать некоторые задержки и PID контроллер может не успевать. И как бы это смешно не было, вызывать вибрации. Но эти вибрации не относятся к пропвош. Это уже просто неэффективная работа PID.
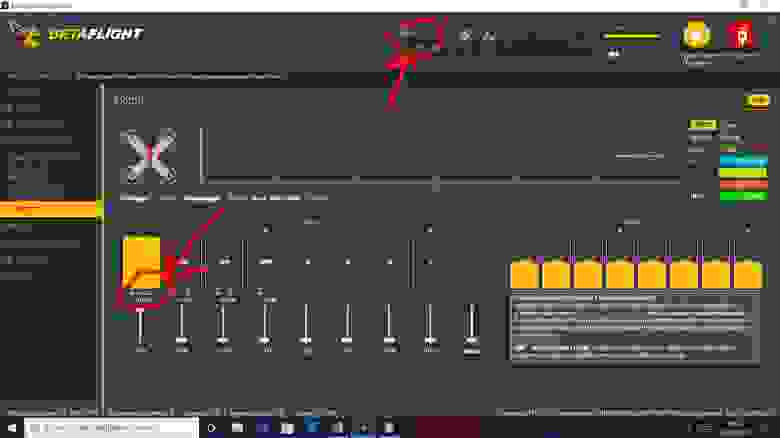
В последних версиях Betaflight есть ползунки, пробуйте не менять значения самих фильтров, а попробуйте использовать эти «мастер» ползунки.
На текущий момент у меня такие настройки с включенным RPM фильтром, возможно я попытаюсь уменьшить фильтрацию еще больше:
Что такое notch filter
Notch-фильтр
Фильтрация сигналов звуковых частот широко используется радиолюбителями. Это связано с тем, что не всегда имеется возможность обрабатывать принимаемый сигнал по промежуточной частоте радиочастотного тракта приемника. Наиболее часто применяемые пассивные RC-фильтры обладают существенными недостатками. Их работа приводит к появлению спектра шумов на выходе приемника непривычного для слуха человека. Длительное пользование таким фильтром может привести к физическому и психическому истощению оператора.
Заметную роль в обработке сигналов по низкой частоте играют активные фильтры, т.е. устройства, выполненные на активных элементах – транзисторах, микросхемах, лампах. Способ реализации достаточно прост и доступен каждому.

Иногда активный НЧ-фильтр включают между предварительным и оконечным каскадами встроенного в приемник УНЧ.
Однако следует отметить, что в этом случае у недостаточно раскаченного входным сигналом НЧ-фильтра будет нарушен такой важный параметр, как отношение сигнал-шум. Это приведет к неудовлетворительной его работе, а именно, к сопровождению приема дополнительными шумами. Вследствие этого, N4PC НЧ-фильтр подключают непосредственно к выходу УНЧ приемника. Таким образом, конструкция представляет собой выносное добавочное устройство.
Более 10 лет тому назад автором этих строк был изготовлен N4PC НЧ-фильтр, а затем описан со ссылкой на его автора в [2]. При повторении конструкции были выполнены все требования по изготовлению устройства, изложенные автором в оригинале статьи, включая применение тех типов микросхем, резисторов, конденсаторов, которые предлагались в первоначальной статье. Правильно собранное устройство сразу начало работать и не требовало каких-либо сложных настроек. Достаточно было лишь его правильно спаять. Благодаря N4PC НЧ-фильтру в течение многих лет работа в эфире приносила огромное удовольствие. Не без его помощи было сработано огромное количество интересных DX-связей.
Однако, время внесло свои коррективы.
Так появился модернизированный вариант N4PC НЧ-фильтра (Рис.2), который имеет рабочее название «Notch-фильтр» и содержит на входе переключаемые активные НЧ-фильтры с различной полосой пропускания конструкции N4PC и CW/Notch-фильтр, взятый из РД.
На выходе Notch-фильтра применяется дополнительный УНЧ, который может быть изготовлен и по другой схеме. Но он должен иметь достаточно большое усиление, минимум искажений и минимум шума на выходе. Выходное сопротивление УНЧ должно соответствовать сопротивлению применяемого громкоговорителя Гр-1. Низкоомные головные телефоны сопротивлением 8…300 Ом во избежание перекачки и для устранения искажений подключают к выходу УНЧ через резистор сопротивлением 270 Ом. Выходная мощность УНЧ должна быть достаточной для прослушивания особо слабых сигналов из эфира и может составлять – 2. 3 Вт.
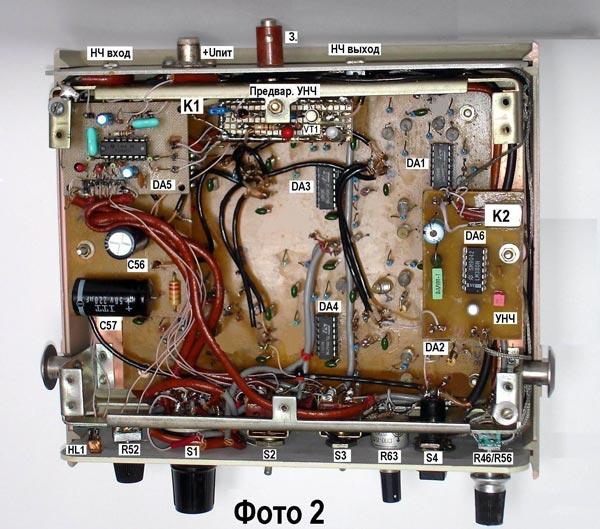
Устройство прошло длительные испытания и в модернизированном виде (Фото 1) находится в работе в течение последних 6 лет.

Надписи на передней панели устройства
AF Notch Filter (Audio Frequency Notch Filter) – Низкочастотный режекторный фильтр; BP (BYPASS) – Обход; CW-W (CW Wide) – CW-широкая полоса; CW-N (CW Narrow) – CW-узкая полоса; SSB-W (SSB Wide) – SSB-широкая полоса; SSB- N (SSB Narrow) – SSB-узкая полоса; Notch – Режекция (переключатель S2 – режим работы устройства); CW – Узкополосный телеграфный фильтр (переключатель S2 – режим работы устройства); Vol (Volume) – Громкость; Notch – Режекция (потенциометр R46/R56 – «Режекция»); ON – Включено; OFF – Выключено.
Обход-1 – исключение из работы активных входных фильтров; Обход-2 – исключение из работы CW/Notch-фильтра; Обход-3 – исключение из работы УНЧ.
Режим «Обход-3» наступает автоматически после выключения Notch-фильтра с помощью переключателя S4, т.е. при снятии напряжения питания с реле К1, К2. Если учесть, что режимы «Обход-1» и «Обход-2» при этом уже выполнены, то на громкоговоритель поступит НЧ сигнал непосредственно с выхода УНЧ приемника. И, наоборот, при подаче напряжения питания с помощью переключателя S4, устройство начинает работать. С помощью переключателей S1, S2 и S3 включают необходимые каскады Notch-фильтра в работу.
Резисторы и конденсаторы, используемые в частотозадающих цепях Notch-фильтра, имеют разброс 5% от указанных на схеме номиналов. При некотором дефиците таких элементов их можно легко отобрать с помощью цифрового прибора из определенного количества деталей, имеющих разброс 10%, которые легко доставаемы. Все резисторы, примененные в данной конструкции – ОМЛТ. Их мощность, кроме тех, которые указаны на схеме – 0,125…0,25 Вт. В частотозадающих НЧ-цепях для достижения высокой добротности крайне необходимо применять неполярные пленочные конденсаторы. Их применение – закон в аудиотехнике. Это относится и к обычным микрофонным усилителям, эквалайзерам, НЧ-трактам магнитофонов, и другой НЧ-технике, где на первом месте стоит реализация расчетных параметров и качество работы готового изделия в целом.
Во входных переключаемых активных фильтрах N4PC применяются пленочные конденсаторы следующих типов:
POLYSTYRENE – 100 пФ, 220 пФ, 680 пФ, 3900 пФ; MYLAR – 0,01 мкф.
Эти, зарубежного производства, конденсаторы не являются дефицитом. На радиорынках их гораздо легче найти, чем наши пленочные. Согласно отечественному каталогу «Конденсаторы» к пленочным и металлопленочным конденсаторам относятся конденсаторы серии: ПО, ПОВ, МПО, МПГ-Ц, МПГО, МПГ-П, К70-6, К71-4, К71-5, К71-6, К71-7, ФГТ-И, К72П-6, К73П-2, К73П-3, К73П-4, К73-9, К73-11. Надо отметить, что не все из перечисленных марок конденсаторов применимы в конструкции Notch-фильтра. Критерий применения один – наличие необходимого номинала у этих конденсаторов и подходящие для печатного монтажа их размеры. Хорошо подходят конденсаторы К70-6 (полистирольные открытые) или К71-6 (полистирольные с фольговыми обкладкам), поскольку они имеют необходимые номиналы – 100 пФ, 220 пФ, 680 пФ, 3900 пФ, 0,01 мк, а их размеры оптимальны для печатного монтажа.
В качестве конденсаторов С43, С44 – 0,022 мк применены конденсаторы типа К71-7 (полистирольные с металлизированными обкладками), а в качестве C46 – 2,2 мк применен неполярный пленочный конденсатор с импортного телефонного аппарата.
Что касается керамических конденсаторов, как всегда, они установлены как блокировочные, а также идущие с шин питания на землю. Например, 0,01 мк – C10, С20, С30, С40, а также 0,1 мк – С45.
Дроссель 2,5 мГн на входе устройства – любого типа. Его развязка на шасси устройства также выполнена с помощью керамических конденсаторов – 0,01 мк. Дроссель может быть самодельный, выполненный на ферритовом кольце или заводской.
Операционные усилители устанавливают в панельки. Желательно применять те ОУ, которые показаны на схеме, а именно, TL084C, имеющие полевые транзисторы на входе. Не исключено применение отечественного аналога К1401УД4 при условии выполнения заявленного в справочниках качества его изготовления.
В данной конструкции желательно отказаться от применения таких операционных усилителей, как LM324, К1401УД2 и других, параметры которых хуже, чем у TL084C. К сожалению, часто замена более простыми и дешевыми аналогами микросхем приводит к снижению качества работы устройства.
Каскад на микросхеме DA5 представляет собой селективный фильтр для улучшения приема телеграфных сигналов (режим «CW») или режекторный фильтр с переменной частотой режекции для подавления (ослабления) мешающих узкополосных сигналов при работе в SSB. Выбор режима «Notch/CW» осуществляется сдвоенным переключателем S2. С помощью сдвоенного переменного резистора R46 и R56 – 100 к устанавливают значение центральной частоты селекции или режекции.
В первоначальном варианте схемы, опубликованной в РД [4], номиналы конденсаторов С43 и С44 (в РД они обозначены как С3 и С4) были 0,047 мк. Эти, а также другие номиналы частотозадающих цепей Notch-фильтра (на рис.2 это – R46/R56, R54, R47, R57, C43, C44) определяют изменение центральной частоты в диапазоне приблизительно 500…2500 Гц. Такой диапазон перестройки фильтра был заявлен в РД [4], где также приведены формулы расчета нижней и верхней границ перестройки (правильность формул в РД вызывает некоторое сомнение).
С переходом из режима выделения частоты (CW) в режим подавления (Notch) центральная частота не меняется. Резистором R52 (Q) можно в небольших пределах изменять добротность фильтра.
Несмотря на то, что каскады устройства выполнены на активных элементах, имеет место затухание полезного сигнала, что приводит к неполной раскачке УНЧ на микросхеме LM380N. Результат – недостаточная выходная мощность УНЧ, нет наполняемости НЧ-сигнала, наличие шумов в канале фильтра, отсутствие ожидаемого результата работы устройства. Для устранения этой проблемы был изготовлен предварительный каскад усиления на полевом транзисторе MPF102 (КП303Б).
Микросхема LM380 запаивается непосредственно в печатную плату. Для обеспечения ее правильного температурного режима между корпусными выводами микросхемы запаивают небольшой отрезок медной шины 2х10 мм.
Изготовление и настройка Notch-фильтра осуществляются поэтапно. Например, изготавливают только входной фильтр – “CW-узкая полоса”. На выходе, плюсом к схеме фильтра, устанавливают электролитический конденсатор – 16 мк, к которому подключают головные телефоны. Если последние являются низкоомными, то их подключение к плате фильтра производят через резистор 150 Ом.
Затем подают питание и сигнал с выхода УНЧ приемника. Убедившись, что проверяемый фильтр работоспособен, приступают к настройке следующего каскада устройства. Таким способом настраивают входные фильтры, затем другие каскады, включая УНЧ. После полной сборки проверяют работу Notch-фильтра в целом.
По мнению автора, все же не исключено применение той части схемы, которая была опубликована в [4]. Обязательно следует установить разделительный конденсатор 2,2 мк (С46 на рис.2), который в оригинале статьи в РД отсутствует. В противном случае, микросхема может выйти из строя, особенно, когда выход этого каскада сразу нагружают на низкоомные головные телефоны.
Всякое устройство имеет свои положительные и отрицательные стороны. О положительных сторонах Notch-фильтра и обработке сигналов по НЧ уже говорилось. К недостаткам можно отнести то, что иногда мощная помеха попадает в полосу пропускания фильтра основной селекции приемника, перегружает УПЧ, и фильтрация по НЧ уже не дает результата. Тем не менее, это момент, который имеет место быть далеко не всегда. Использование Notch-фильтра позволяет в значительной степени избавиться от сплеттеров мощных станций, работающих на близлежащих частотах, улучшить качество связи, что является положительным фактором.



