PIC-микроконтроллеры, где могут пригодиться радиолюбителю?
Среди множества семейств микроконтроллеров от разных производителей радиолюбители полюбили два – AVR и PIC. Микроконтроллеры PIC производятся компанией Microchip.
Энтузиастами и любителями в области электроники часто используются как для сборки готовых проектов, так и для разработки своих малых автоматизированных систем. Для примера многие встраиваемые вольт-амперметры из Китая построены на базе PIC-контроллеров.

Виды микроконтроллеров PIC и их архитектура
Пожалуй, среди начинающих очень распространены микроконтроллеры пик младших моделей, а именно семейств:
Эти микроконтроллеры 8-битные, при этом различают две архитектуры:
В разработках радиолюбителей очень часто встречается модель 16f628. Конфигурация этого pic-микроконтроллера следующая, в нём есть:
PIC16 имеют низкую цену и достаточно развитую аналоговую периферию, что и обеспечивает их популярность. При этом модели могут выпускаться в корпусах с количеством ножек от 18 до 40. Это позволяет делать более сложные системы, чем возможно на вышеприведенном примере.
Существуют и более мощные модели, например, 16-битные:
Они способны выполнять 16 MIPS (миллионов итераций в секунду), что обеспечивает весьма высокое быстродействие вашей системы при 2 при двухтактном машинном цикле, такая скорость обеспечивается частотой в 32 МГц. 40 MIPS достигается при 80 МГц соответственно.
32-битные микроконтроллеры PIC32MX имеют большую производительность и превосходящий объём памяти, если сравнивать с 16-битными моделями, и работают на частоте в 80 МГц.
Сфера применения PIC-микроконтроллеров
Как уже было сказано, семейство PIC16 очень любят радиолюбители. К тому же оно хорошо описано в большом количестве литературы. По количеству учебников с семейством PIC, на момент написания статьи, может посоревноваться только семейство AVR.
Давайте рассмотрим несколько схем с применением микроконтроллеров семейства PIC.
Таймер для управления нагрузкой на PIC16f628
Простейшая автоматика на микроконтроллерах PIC – это стихия 8-битного семейства. Их объём памяти не позволяет делать сложных систем, но отлично подходит для самостоятельного выполнения пары поставленных задач. Так и эта схема трёхканального таймера на Pic16f628, поможет вам управлять нагрузкой любой мощности. Мощность нагрузки зависит только от установленного реле/пускателя/контактора и пропускной способности электросети.

Настраивается прибор с помощью набора из 4-х кнопок SB1-SB4, на HG1 выводятся параметры, это дисплей типа LCD на 2 строки по 16 символов. В схеме используется внешний кварцевый резонатор на 4 МГц, а KV1 – это реле, с питанием катушки в 24 В, вы можете использовать любое реле, лишь бы оно подходило по напряжению катушки к вашему БП. МК питается от 5 В стабилизированного источника.
Вы можете использовать от 1 до 3 каналов в управлении нагрузкой, стоит только продублировать схему, добавив реле к выводам RA3, RA4 микроконтроллера.

Часы-будильник на МК PIC16f628A
Такие часы, согласно заявлениям разработчика, получились весьма точными, их погрешность весьма мала – порядка 30 секунд в год.

С незначительными переделками вы можете использовать любые 7-мисегментные индикаторы. Питаются от блока питания на 5В, при этом, при отключении от сети продолжают работать от батареек, что вы можете увидеть в правом верхнем углу схемы.
Регулятор мощности паяльника на PIC16f628A
У начинающих радиолюбителей не всегда есть возможность купить паяльную станцию. Но они могут собрать её сами. На схеме ниже представлен регулируемый блок питания на PIC16f628, для работы паяльника. В основу схемы вложено фазоимпульсное управление. Это, по сути, доработанный и осовремененный аналог классического тиристорного регулятора, но с микроконтроллерным управлением.

Схема довольно простая, в нижней части реализация светодиодной индикации. Главный силовой элемент – тиристор BT139, а MOC3041 – нужен для гальванической развязки МК от сети и управления тиристором с помощью логического уровня в 5 В.
Как прошивать микроконтроллер? С чего начать изучение?
Официальный программатор для семейств PIC – это PICkit V3, является наиболее распространенным. Программный код загружается в чип с помощью ПО, которое есть на диске, он идёт в комплекте с программатором. IDE имеет название MPlab. Является официальной средой разработки от производителя, между прочим, бесплатной. Для изучения устройств есть отличная книга на русском языке «Pic-микроконтроллеры. Полное руководство» автор её Сид Катцен. Кроме этой книги вы найдете огромное количество видео-уроков и текстовых материалов, которые вам помогут.
Применение микроконтроллеров PIC весьма широко, многие радиолюбители собирают металлоискатели и счетчики Гейгера на этих МК.
Микроконтроллеры PIC для начинающих
На современном рынке есть ряд семейств и серий микроконтроллеров от разных производителей, среди них можно выделить AVR, STM32 и PIC. Каждое из семейств нашло свою сферу применения. В этой статье я расскажу начинающим о микроконтроллерах PIC, а именно, что это такое и что нужно знать для начала работы с ними.

Что такое PIC
PIC – это название серии микроконтроллеров, которые производятся компанией Microchip Technology Inc (США). Название PIC происходит от Peripheral Interface Controller.
Микроконтроллеры PIC имеют RISC-архитектуру. RISC – сокращённый набор команд, используется также в процессорах для мобильных устройств. Есть целый ряд примеров её использования: ARM, Atmel AVR и другие.
Компания Microchip в 2016 году купила Atmel – производителя контроллеров AVR. Поэтому на официальном сайте представлены микроконтроллеры семейства и PIC и AVR.

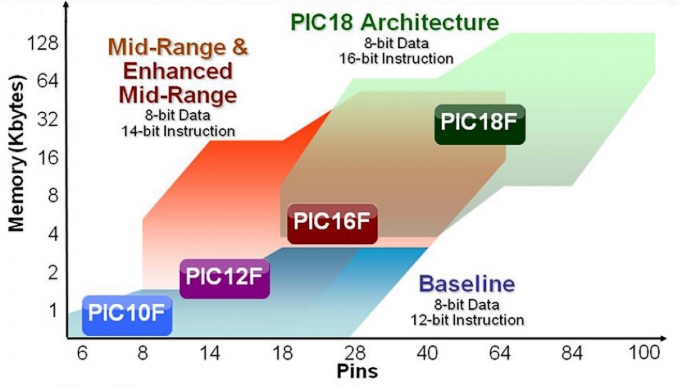
Семейства
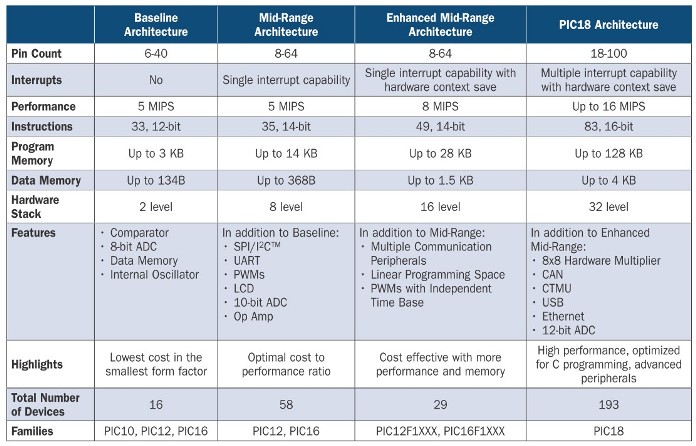
Среди 8-битных микроконтроллеров PIC она состоит из 3-х семейств, которые отличаются архитектурой (разрядностью и набором команд).
Baseline (PIC10F2xx, PIC12F5xx, PIC16F5x, PIC16F5xx) ;
Mid-range (PIC10F3xx, PIC12F6xx, PIC12F7xx, PIC16F6xx, PIC16F7xx, PIC16F8xx, PIC16F9xx) ;
Enhanced Mid-range (PIC12F1xxx, PIC16F1xxx) ;
High-end или PIC18 (18Fxxxx, 18FxxJxx and 18FxxKxx).
Характеристики, которых приведены в таблице ниже.
Кроме 8 битных микроконтроллеров компания Microchip производит 16-битные:
DsPIC30/33F для обработки сигналов.
Представители 16-битного семейства работают со скоростью от 16 до 100 MIPS (выполнено миллионов инструкций в секунду). Стоит отметить и особенности:
машинный цикл – 2 такта;
разрядность АЦП – 16 бит;
поддерживают ряд протоколов связи (UART, IrDA, SPI, I2S™, I2C, USB, CAN, LIN and SENT), ШИМ и прочее.
Также есть семейство 32 битных микроконтроллеров – PIC32MX, основные особенности:
работают на частоте до 120 мГц;
выполняют до 150 MIPS;
АЦП: 10-бит, 1 Msps (скорость квантования), до 48 каналов.
С какого PIC начать?
Новичкам стоит начать осваивать микроконтроллеры PIC с 8-битной линейки. Вообще, производитель заявляет о том, что особенностью всего семейства является лёгкая переносимость программ с одного семейства на другое и совпадения цоколевки ряда моделей.
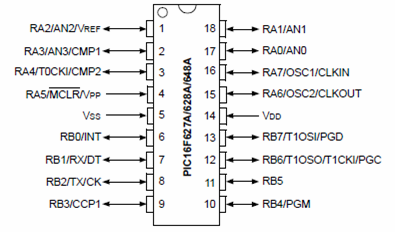
Одним из популярнейших в среде радиолюбителей микроконтроллеров является PIC16f628A. Его технические характеристики такие:
Есть встроенный тактовый генератор. Вы можете настроить для работы с частотой 4 или 8 МГц;
18 пинов, из них 16 – ввод/вывод, а 2 – питание;
Для работы на частотах до 20 МГц можно подключить кварцевый резонатор, но в этом случае на ввод/вывод останется не 16, а 14 ног;
В маркировке есть буква F, это значит, что используется FLASH-память, объёмом в 2048 слов;
14-битные инструкции, 35 штук;
4 аналоговых входа;
На входах PORTB есть подтягивающие резисторы;
Два 8-битных таймера и один 16-битный;
Машинный цикл – 4 такта кварцевого резонатора или внутреннего генератора);
USART – последовательный порт;
внутренний источник опорного напряжения;
питается от 3.3 до 5 В.
Причинами популярности является низкая цена и возможность тактирования от внутреннего генератора.
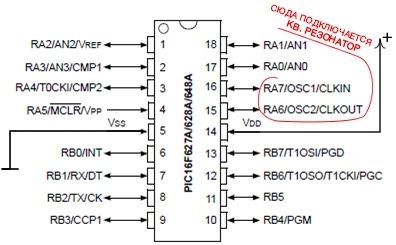
Какая цоколевка у 16f628 изображено ниже:
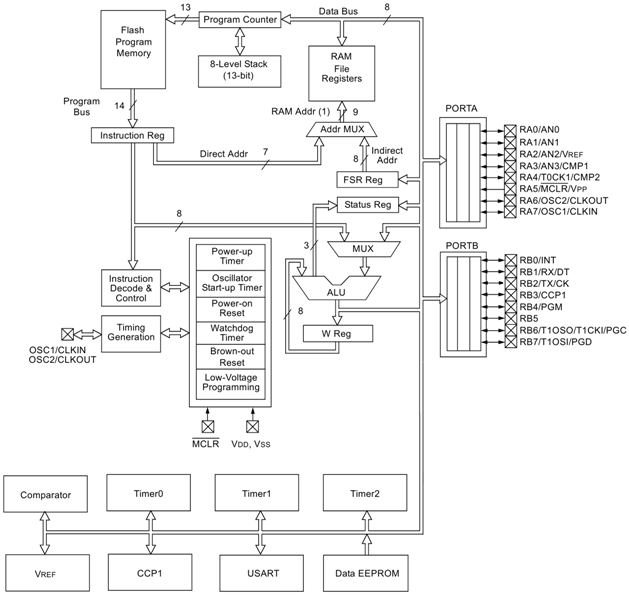
Блочная внутренняя схема этого микроконтроллера изображена ниже.
Научитесь разрабатывать устройства на базе микроконтроллеров и станьте инженером умных устройств с нуля: Инженер умных устройств
На что следует обратить внимание на схеме в первую очередь?
У этого микроконтроллера есть два порта PORTA и PORTB. Каждый пин, каждого из них может использоваться как вход и выход, а также для подключения периферии или задействования других модулей микроконтроллера.
Рассмотрим эту часть схемы крупно.
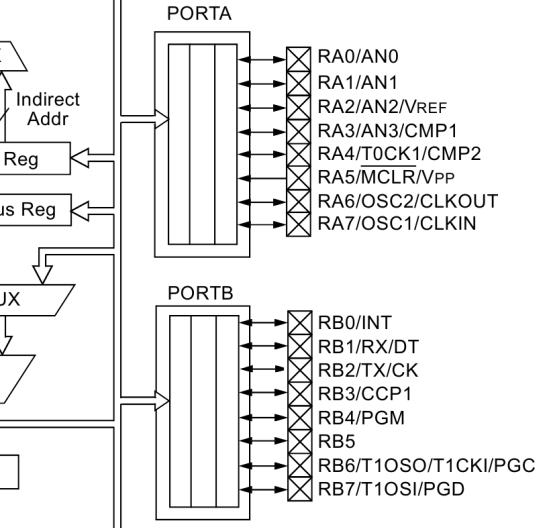
Например, порты RB0-RB3 – могут выступать в роли аналоговых. К RA6, RA7 в случае необходимости подключается источник тактирования (кварцевый резонатор). Сами же выводы микроконтроллера настраиваются в режим входа/выхода с помощью регистра TRIS.
Для этого есть команды типа:
TRISA = 0; // Все выводы порта А устанавливаются как выходы
TRISB = 0xff; // Все выводы порта B назначаются как входы
TRISA0 = 1; // Так назначается отдельный пин как вход (1) или выход (0)
TRISA5 = 1 ; // здесь 5 вывод порта А – назначен входом
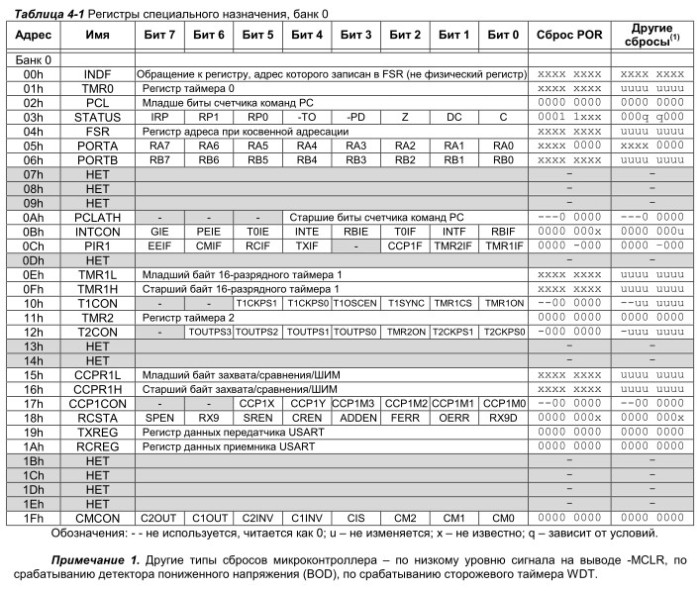
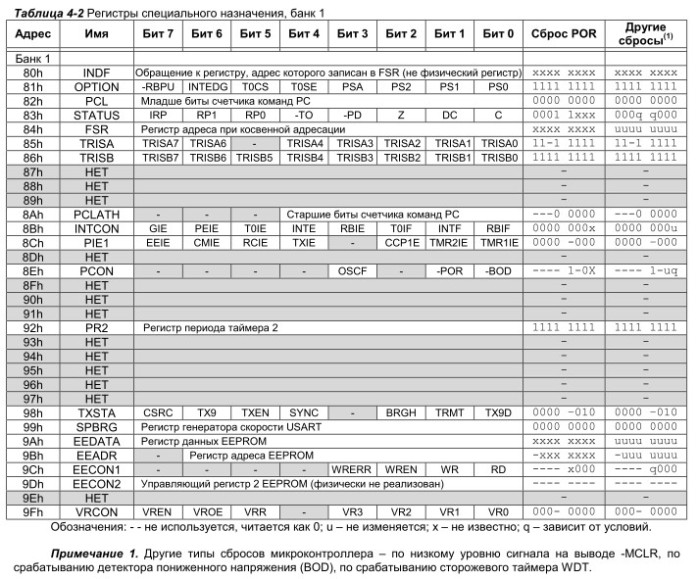
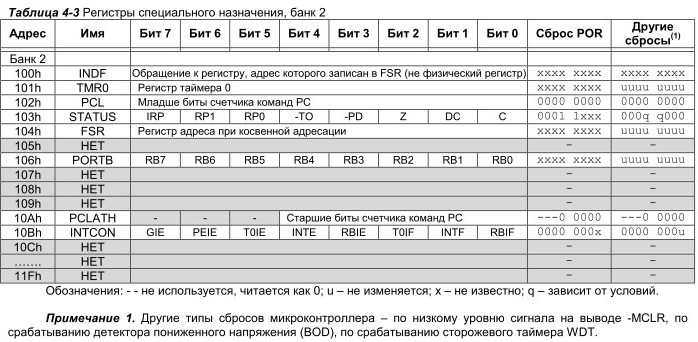
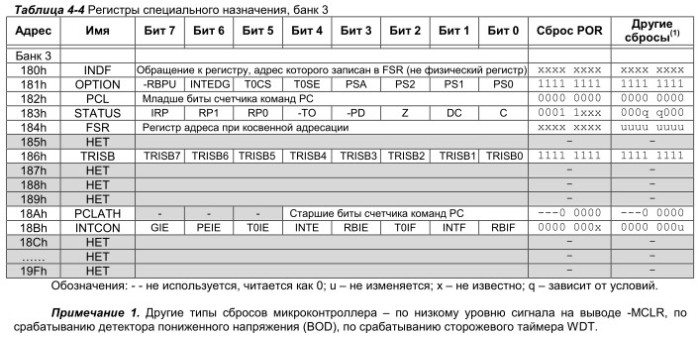
Вообще режимы работы, включение WDT (сторожевого таймера) выбор источника тактирования микроконтроллера и прочее настраивается с помощью регистров специального назначения — SFR, а память и данные хранятся в GFR – простыми словами это статическое ОЗУ.
Для удобства ниже приведены эти таблицы в виде картинок (нумерация регистров, как и всё в цифровой электронике начинается с 0, поэтому номер четвертого – 3).
Как подключить и на каком языке программировать?
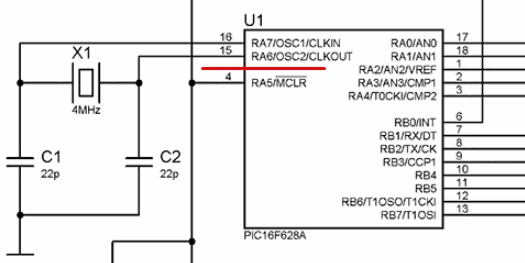
Чтобы запустить этот микроконтроллер достаточно подать плюс на Vdd и минус на Vss. Если нужен кварцевый резонатор, то он подключается к выводам 16 и 15 (OSC1 и OSC2) микроконтроллера PIC16f628, для других контроллеров с большим или меньшим числом выводов – смотрите в datasheet. Но этот момент нужно указывать при программировании и прошивке.
Кстати о переносимости и совпадении цоколевки – на 16f84A – она аналогична, и на многих других.
Фрагмент схемы с подключенным к pic16f628a внешним резонатором:
Есть два основных языка для программирования микроконтроллеров PIC – это assembler и C, есть и другие, например PICBasic и т.д. Еще можно выделить упрощенный язык программирования JAL (just another language).
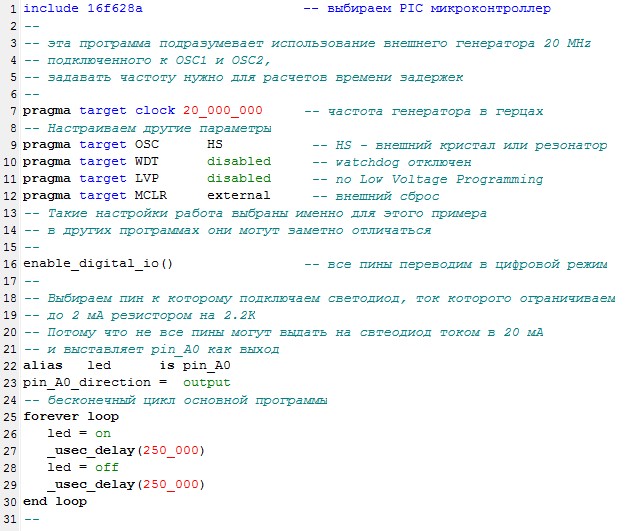
Для примера ниже приведена программа для «мигания светодиодом» — своего рода «Hello World» для микроконтроллера PIC на языке C.
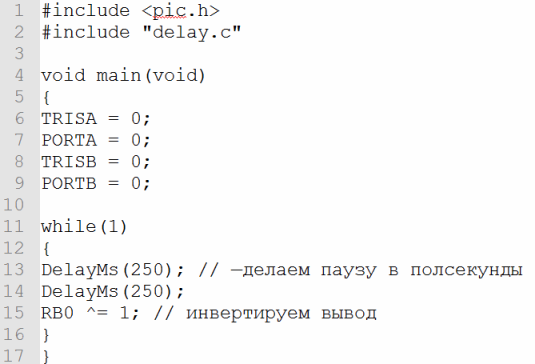
В 1 строке подключается библиотека микроконтроллеров PIC, далее подключается библиотека программы задержки.
В функции main(void) в начале устанавливаются начальные параметры, подобно тому как мы это делали в функции Void setup () – в статьях об ардуино. Далее в строках 11-16 объявляется бесконечный цикл while(1), в ходе которого и выполняется программа «мигания светодиодом».
В примере состояние порта постоянно инвертируется, т.е. если он был в «0», то перейдет в «1» и наоборот. На C для PIC есть следующие команды управления команды:
PORTA = 0; // переводит все пины порта А в низкий уровень (лог. 0)
PORTB = 0xff; // переводит все пины порта B в высокий уровень (лог. 1)
RB5 = 1; // На пятом выводе порта B высокий уровень
А так выглядит та же программа, но уже на языке JAL, я перевел на русский язык комментарии от разработчиков встроенных примеров в JALedit (среда разработки).
Возникает соблазн выбрать JAL, и вам он может показаться проще. Безусловно на нём можно реализовать любые проекты, но с точки зрения пользы для вас как для специалиста – это бесполезный язык. Значительно больших результатов вы добьетесь, изучая синтаксис и принципы программирования на языке C (большая часть популярных сейчас языков C-подобны) или на Assembler – это низкоуровневый язык, который заставит вас понимать принцип работы устройства и что происходит в программе в каждый конкретный момент времени.
В чем работать
Если сказать совсем обобщенно для работы с любыми микроконтроллерами нужно:
1. Текстовый редактор.
3. Программа для загрузки прошивки в микроконтроллер.
И я даже читал старые учебники, где автор, работая из-под DOS писал код, компилировал и прошивал его разными средствами. Сейчас же под все популярные операционные системы есть среды для разработки, как узкоспециализированные (для конкретного семейства микроконтроллеров или семейств от одного производителя) так и универсальные (либо содержат все необходимые инструменты, либо они подключаются в виде плагинов).
Например, в цикле статей об Arduino мы рассматривали среду Arduino IDE в ней же мы и код писали и с её помощью «заливали» прошивку в «камень». Для микроконтроллеров PIC есть такие программы, как:
MPASM — используется для разработки на языке Assembler от фирмы Microchip ;
MPLAB — также IDE от Microchip для PIC-контроллеров. Состоит из множества блоков для тестирования, проверки, работы с кодом и компиляции программ и загрузки в микроконтроллер. Также есть версия MPLAB X IDE – отличается большим функционалом и построена на базе платформы NetBeans ;
MikroC — универсальная среда (не только для ПИКов) для разработки. Как видно из названия «заточена» под программирование на C, а также есть такие программы как MikroBasic и MikroPascal, для соответствующих языков ;
JALedit — подходит для языка JAL, о котором мы упоминали выше ;
И ряд других менее известных.
Как прошивать микроконтроллер?
Для PIC-микронотроллеров есть ряд программаторов. Официальным считается PICkit. Их 4 версии. Но можно прошивать и универсальными, например, TL866 (он поддерживает почти всё, что может понадобится начинающему радиолюбителю, при этом очень дешевый).

Также в сети есть ряд различных схем программаторов для ПИКов, как для работы через COM-порт:
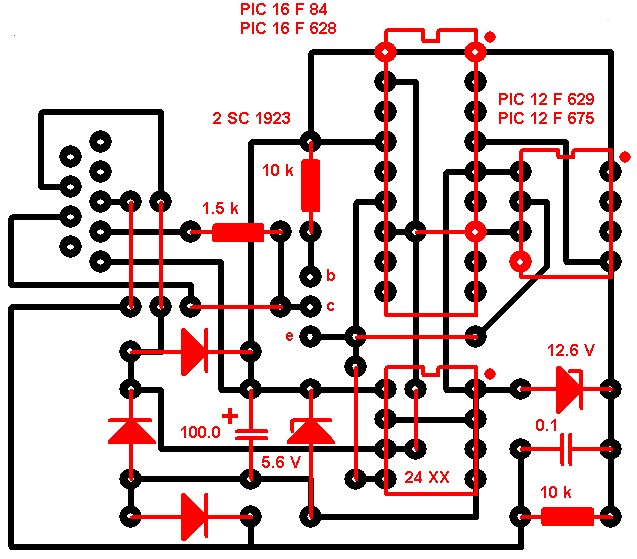
Так и через USB (на самом деле тоже com, только через преобразователь на ИМС MAX232).

Заключение
Микроконтроллеры PIC16 подходят для простых проектов, типа простой автоматики, вольтметров, термометров и прочих мелочей. Но это не значит, что нельзя делать на этом семействе сложные и большие проекты, я привел пример того для чего чаще всего их используют. Для общего представления рекомендую посмотреть несколько видео:
В одной статье рассматривать темы о том, как программировать микроконтроллеры, неважно какого семейства, безсмысленно. Поскольку это очень большой объём информации. Для начинающих советую к прочтению:
Катцен С. — PIC-микроконтроллеры. Все что вам необходимо знать;
Кёниг А. — Полное руководство по PIC микроконтроллерам;
Шпак Ю.А. — Программирование на языке С для AVR и PIC микроконтроллеров;
Магда Ю.С. — Микроконтроллеры PIC: архитектура и программирование;
Яценков В.С. — Микроконтроллеры Microchip. Практическое руководство.
Любите умные гаджеты и DIY? Станьте специалистом в сфере Internet of Things и создайте сеть умных гаджетов!
Записывайтесь в онлайн-университет от GeekBrains:

Изучить C, механизмы отладки и программирования микроконтроллеров;
Получить опыт работы с реальными проектами, в команде и самостоятельно;
Получить удостоверение и сертификат, подтверждающие полученные знания.
Starter box для первых экспериментов в подарок!
После прохождения курса в вашем портфолио будет: метостанция с функцией часов и встроенной игрой, распределенная сеть устройств, устройства регулирования температуры (ПИД-регулятор), устройство контроля влажности воздуха, система умного полива растений, устройство контроля протечки воды.
Вы получите диплом о профессиональной переподготовке и электронный сертификат, которые можно добавить в портфолио и показать работодателю.
Микроконтроллеры PIC. Вводная.

Что-то никто не хочет написать про микроконтроллеры фирмы Microchip, вот и решил я запилить статейку — может кому пригодится.
О том, что же это за звери такие, какие они бывают и что умеют неплохо написано в вики-пики и, естественно, на официальном сайте.
В номенклатуре Microchip Technology Inc. представлен широкий спектр 8-и, 16-и и 32-битных микроконтроллеров и цифровых сигнальных контроллеров под маркой PIC. Номенклатура насчитывает более 500 различных контроллеров со всевозможными вариациями периферии, памяти, количеством выводов, производительностью, диапазонами питания и температуры…
Вот и всё касательно ядра. Остальное считается периферией, основные модули, присутствующие во всех МК это порты ввода/вывода, прерывания и таймеры, но это уже совсем другая тема.
Намекну лишь, что есть ещё слово конфигурации — область памяти в которой хранятся постоянные параметры (режим генератора, биты защиты, биты включения некоторых аппаратных функций, режим работы вывода сброса), а программируется это дело в процессе прошивки.
Без внимания остались также вопросы системы команд, программирования, прошивки, отладки, мигания светодиодом, etc…
Ссылки:
www.microchip.com
microchip.com.ru
www.microchip.ru
Активно пользовал «справочник по среднему семейству микроконтроллеров PIC-micro» — перевод оригинальной технической документации DS33023A с microchip.ru, а также даташиты (в оригинале).
з.ы. опыт работы с пиками — один раз зашил готовую прошивку. в эмулях когда-то ковырялся, а тут пару дней ДШ читал, да вам писал. Первая моя статья, так что любая критика приветствуется. Знаю, что тут обитают те, кто работал с этими МК, не стесняйтесь дополнять, поправлять, я мог что-то упустить или в чём-то ошибиться.
Если интересно, то в свободное время попробую написать продолжение, дальше по сути нужно писать про софт, программатор, систему команд и периферию, в таком порядке.
Всем дочитавшим до конца — спасибо!
Средства программирования PIC-контроллеров
Введение
PIC-контроллеры остаются популярными в тех случаях, когда требуется создать недорогую компактную систему с низким энергопотреблением, не предъявляющую высоких требований по ее управлению. Эти контроллеры позволяют заменить аппаратную логику гибкими программными средствами, которые взаимодействуют с внешними устройствами через хорошие порты.
Миниатюрные PIC контроллеры хороши для построения преобразователей интерфейсов последовательной передачи данных, для реализации функций «прием – обработка – передача данных» и несложных регуляторов систем автоматического управления.
Компания Microchip распространяет MPLAB — бесплатную интегрированную среду редактирования и отладки программ, которая записывает бинарные файлы в микроконтроллеры PIC через программаторы.
Взаимодействие MPLAB и Matlab/Simulink позволяет разрабатывать программы для PIC-контроллеров в среде Simulink — графического моделирования и анализа динамических систем. В этой работе рассматриваются средства программирования PIC контроллеров: MPLAB, Matlab/Simulink и программатор PIC-KIT3 в следующих разделах.
• Характеристики миниатюрного PIC контроллера PIC12F629
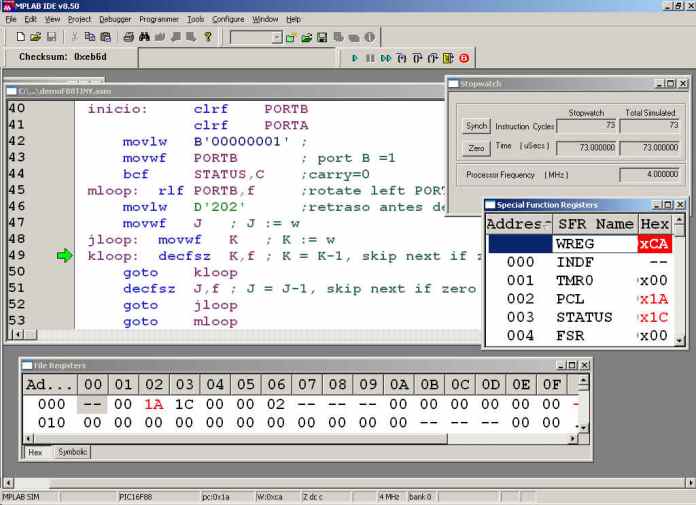
• Интегрированная среда разработки MPLAB IDE
• Подключение Matlab/Simulink к MPLAB
• Подключение программатора PIC-KIT3
Характеристики миниатюрного PIC-контроллера
Семейство РIС12ххх содержит контроллеры в миниатюрном 8–выводном корпусе со встроенным тактовым генератором. Контроллеры имеют RISC–архитектуру и обеспечивают выполнение большинства команд процессора за один машинный цикл.
Для примера, ниже даны характеристики недорогого компактного 8-разрядного контроллера PIC12F629 с многофункциональными портами, малым потреблением и широким диапазоном питания [1].
• Архитектура: RISC
• Напряжение питания VDD: от 2,0В до 5,5В ( >path без аргументов приводит к отображению списка путей переменной path в окне команд (Command Window). Удалить путь из переменной path можно командой rmpath, например:
4. Создайте Simulink модель для PIC контроллера, используя блоки библиотеки «Embedded Target for Microchip dsPIC» (Рис. 13), или загрузите готовую модель, например, Servo_ADC.mdl.
Тип контроллера, для которого разрабатывается Simulink модель, выбирается из списка в блоке Master > PIC (Рис. 16, Рис. 10), который должен быть включен в состав модели.

Рис. 16. Выбор типа контроллера в блоке Master модели.
Рис. 17. Выбор компилятора S-функций dspic.tlc для моделей PIC-контроллеров в разделе «основное меню → Simulation → Configuration Parameters → Code Generation».
6. Откомпилируйте модель tmp_Servo_ADC.mdl. Запуск компилятора показан на Рис. 18.
Рис. 18. Запуск компилятора Simulink модели.
В результате успешной компиляции (сообщение: ### Successful completion of build procedure for model: Servo_ADC) в текущем каталоге создаются HEX файл для прошивки PIC контроллера и MCP проект среды MPLAB (Рис. 19).
Рис. 19. Результаты компиляции модели.
Запуск модели в Matlab/Simulink выполняется в окне модели кнопкой, условное время моделирования устанавливается в строке:
Управление компиляцией Simulink моделей из среды MPLAB
Управление компиляцией Simulink модели можно выполнять командами раздела Matlab/Simulink среды MPLAB, например, в следующем порядке.
1. Разработайте модель PIC контроллера в Matlab/Simulink. Сохраните модель.
2. Запустите MPLAB.
3. Выберите MPLAB меню → Tools → Matlab/Simulink и новый раздел появится в составе меню.
4. В разделе Matlab/Simulink откройте Simulink модель, например, Servo_ADC, командой «Matlab/Simulink → Specify Simulink Model Name → Open → File name → Servo_ADC.mdl → Open». Команда Open запускает Matlab и открывает модель.
5. Откомпилируйте модель и создайте MCP проект командами Generate Codes или Generate Codes and Import Files. Перевод MDL модели в MCP проект выполняется TLC компилятором Matlab.
В результате создаётся проект MPLAB:
со скриптами модели на языке Си.
6. Откройте проект: меню → Project → Open → Servo_ADC.mcp (Рис. 20).
Рис. 20. Структура MCP проекта Simulink модели Servo_ADC.mdl в среде MPLAB.
Проект Simulink модели готов для редактирования, отладки и компиляции в машинные коды контроллера средствами MPLAB.
Подключение программатора PIC-KIT3
Узнать какие программаторы записывают бинарный код в конкретный микроконтроллер можно в разделе меню → Configure → Select Device среды MPLAB 8.92. Например, программатор PIC-KIT3 не поддерживает контроллер PIC12C508A (Рис. 21, левый рисунок), но работает с контроллером PIC12F629 (Рис. 21, правый рисунок).
Рис. 21. Перечень программаторов для прошивки микроконтроллера.
Информацию об установленном драйвере программатора PIC-KIT3 можно запросить у менеджера устройств ОС Windows (Рис. 22).
Рис. 22. Информация об установленном драйвере программатора PIC-KIT3.
Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3 показана на Рис. 23.
Рис. 23. Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3.
Вывод PGM программатора для прошивки контроллеров PIC12F629 не используется. Наличие вывода PGM для разных типов PIC контроллеров показано на Рис. 24. Вывод PGM рекомендуется «притягивать» к общему проводу (GND), через резистор, номиналом 1К [3].
Рис. 24. Выводы PGM PIC контроллеров.
Индикация светодиодов программатора Olimex PIC-KIT3 показана в ниже:
Желтый — Красный — Состояние программатора
Вкл — Выкл — Подключен к USB линии
Вкл — Вкл — Взаимодействие с MPLAB
Мигает — Включен постоянно — Прошивка микроконтроллера
Не следует подключать питание микроконтроллера VDD (Рис. 23) к программатору, если контроллер запитывается от своего источника питания.
При питании микроконтроллера от программатора на линии VDD необходимо установить рабочее напряжение, например, 5В программой MPLAB (Menu → Programmer → Settings → Power), как показано на Рис. 25.
Примечание. При отсутствии напряжения на линии VDD MPLAB IDE выдает сообщение об ошибке: PK3Err0045: You must connect to a target device to use
Рис. 25. Установка напряжения VDD на программаторе PIC-KIT3 программой MPLAB IDE v8.92.
Если программатор не может установить требуемое напряжение, например, 5В при его питании от USB, в которой напряжение меньше 5В, MPLAB IDE выдает сообщение об ошибке: PK3Err0035: Failed to get Device ID. В этом случае, сначала необходимо измерить напряжение программатора — считать его в закладке меню → Programmer → Settings → Status, а затем установить напряжение (не больше измеренного) в закладке меню → Programmer → Settings → Power.
Рис. 26. Измерение (слева) и установка (справа) VDD напряжения программатора PIC-KIT3 программой MPLAB IDE v8.92.
Пример MPLAB сообщения успешного подключения микроконтроллера к программатору по команде меню → Programmer → Reconnect показан на Рис. 27.
Рис. 27. Сообщение MPLAB об успешном подключении микроконтроллера к программатору.
Можно программировать не только отдельный PIC контроллер, но и контроллер, находящийся в составе рабочего устройства. Для программирования PIC контроллера в составе устройства необходимо предусмотреть установку перемычек и токоограничивающих резисторов как показано на Рис. 28 [3].
Рис. 28. Подключение микроконтроллера в составе электронного устройства к программатору.
Заключение
Малоразрядные PIC-контроллеры имеют широкий диапазон питания, низкое потребление и малые габариты. Они программируются на языках низкого уровня. Разработка программ на языке графического программирования Simulink с использованием многочисленных библиотек значительно сокращает время разработки и отладки в сравнении с программированием на уровне ассемблера. Разработанные для PIC-контроллеров Simulink структуры можно использовать и для компьютерного моделирования динамических систем с участием контроллеров. Однако, из-за избыточности кода такой подход применим только для семейств PIC контроллеров с достаточными ресурсами.



