Дроно-панорама.
PPM и s.BUS. Практическое канальное шиноводство.

Занимаясь коптеро-строительством столкнулся с необходимостью передачи от приемника к контроллеру множества управляющих сигналов (до 7-8 штук). Это выражалось в заплетании косичек из стандартных трехжильных сигнальных патчей (проводков). Эти косички увеличивали массу аппарата и снижали надежность из-за большого числа разъемных соединений.
На данный момент попробовал две технологии, позволяющие соединять приемник и мозги коптера только одним сигнальным патчем (проводком).
Это технологии PPM и s.Bus.
Хочу донести до аудитории тонкие моменты и нюансы, которые выяснил при практическом изучении этих протоколов.
Теперь по аппаратной части. Что реально удалось попробовать в работе.
При подключении приемников к полетным контроллерам рекомендую Вам не лениться и внимательно изучать распиновку разъемов на мозгах. Лично я, когда заводил s.Bus в CC3D час чесал репу, пытаясь подать s.Bus на PWM1. Как оказалось, s.Bus там вообще на отдельном разъеме.
Поскольку сейчас основой аппой у меня является Turnigy 9XR Pro, сообщаю по ее линейке.
В продуктах FrSky следующие приемники работают с шинами PPM и s.Bus.
3. s.Bus и PPM есть и на приемниках FrSky в стандарте FASST (FUTABA). Вся инфа есть по ссылке, поскольку FUTAB’ой никогда не владел, соответсвенно руками не пробовал. Оставляю это Вам на откуп.
Обновлено 30.11.2014 в 01:33 [ARG:5 UNDEFINED]
RCDetails Blog
О коптерах и не только
Протоколы в приемниках и передатчиках: PWM, PPM, SBus, DSM2, DSMX, SUMD

Когда вы читаете про пульты управления (передатчики) и приемники для них, то часто сталкиваетесь с сокращениями типа: PWM, PPM, SBUS, DSMX и т.д. В этой статье мы расскажем про разницу между сигналами/протоколами в передатчиках и приемниках.
Протоколы передачи данных в передатчиках и в приемниках
Те, кто только начинает заниматься этим хобби могут запутаться в протоколах, форматах данных. Попробуем объяснить основные характеристики и отличия.
Эти протоколы передачи данных используются в дронах, радиоуправляемых самолетах, коптерах и других устройствах. Их можно разбить на 2 группы:
![]()
Некоторые протоколы в приемниках очень широко распространены и используются большинством брендов, другие протоколы являются закрытыми и используются только некоторыми брендами. Примеры:
Протоколы, используемые в передатчиках, часто реализованы только одним брендом. Некоторые бренды позволяют использовать несколько протоколов, в зависимости от имеющихся у вас приемников. Примеры:
PWM (ШИМ) — Pulse Width Modulation
Это наиболее распространенный тип выходного сигнала у приемников. Раньше, когда радиоуправление использовалось только для самолетов, приемники нужны были для управления сервомашинками и регуляторами хода, сигнал был только одного вида — PWM, один канал/кабель для каждой сервомашинки. Эта же технология широко используется и в наше время.
Мультикоптерам нужно как минимум 4 или 5 каналов (иногда даже больше), и именно такое же количество разъемов будет использоваться для подключения приемника к полетному контроллеру.

PWM (ШИМ) значит pulse-width-modulation (широтно-импульсная модуляция), длина импульса определяет положение сервомашинки или уровень газа. Обычно длительность импульса варьируется между 1000мкс и 2000мкс, где 1000 мкс — это минимум (одно крайнее положение), а 2000 мкс — максимум (другое крайнее положение).
Радиоприемник с выходами PWM — это наиболее часто используемый тип, и как правило самый дешевый. Однако, чтобы избежать клубка проводов, хоббисты предпочитают использовать PPM и SBUS.
PPM — Pulse Position Modulation
PPM также известен как PPMSUM и CPPM. Преимущество PPM в том, что нужен только один провод для передачи нескольких каналов (как правило до 8 каналов), вместо отдельных проводов для каждого канала. Так что в этом случае нужно подключить только 3 провода: питание, земля и сигнал.

PPM сигнал — это просто последовательность PWM импульсов, идущих друг за другом по одному проводу.
PPM это то что называется «аналоговый сигнал, распределенный по времени», каналы посылаются один за другим, а не одновременно. Следовательно, передача данных немного не точная и есть джиттер (отклонение во времени) в отличие от цифрового последовательного канала, но этот вариант широко используется и поддерживается множеством полетных контроллеров.
PCM — Pulse Code Modulation
PCM значит pulse-code-modulation, т.к. импульсно кодовая модуляция, очень похож на PPM. Однако PCM это цифровой сигнал (ноли и единицы), в то время как PPM — это аналоговый сигнал (где учитывается длительность импульсов). PCM сигнал можно проверить на наличие ошибки, или даже использовать коды для исправления ошибок (но это зависит от устройств, в которых он применяется).
PCM более надежен и менее подвержен интерференции (межканальной), но при его использовании требуется дополнительное преобразование, так что оборудование теоретически более дорогое.
Протоколы последовательной передачи данных
Последовательная передача цифровых данных использует 3 провода (сигнал, земля и питание) для передачи множества каналов (да и вообще любых данных, прим. перев.). Этот тип передачи требует наличия последовательного порта как на приемнике, так и на полетном контроллере. SBUS, XBUS, MSP, IBUS, SUMD — все это виды последовательной передачи данных.
SBUS (S.BUS) – Frsky, Futaba
SBUS — это протокол последовательной передачи данных, используемый Futaba и FrSky, который поддерживает передачу до 18 каналов по 1 проводу.
SBUS — это инвертированный сигнал UART (COM порт). Практически все контроллеры могут читать UART, но не все они понимают инвертированный сигнал (например, Naze32 rev5 или более старые — не понимают), поэтому требуется добавлять специальный инвертор сигнала. Однако, некоторые контроллеры, типа Pixhawks и другие на F3, имеют встроенный инвертор сигнала именно для этих целей.
IBUS — Flysky
IBUS — это новый протокол, используемый FlySky. Передача данных двунаправленная, т.е. можно как принимать, так и передавать данные — передавать данные к сервам и получать данные с датчиков.
XBUS – JR
XBUS используется фирмой JR, поддерживает до 14 каналов по 1 проводу. Одно из преимуществ — очень маленькая задержка сигнала между каналами.
MSP (multiwii serial protocol)
Протокол созданный как часть программного обеспечения multiwii. Позволяет передавать до 8 каналов по одному проводу.
Graupner Hott SUMD
Graupner SUMD — это протокол типа SBUS. Каналы кодируются в один цифровой сигнал, и не имеет заметной задержки при передаче. Преимущества SUMD:
Graupner SumH
Это старый протокол от Graupner. Они выпустили обновление для своих приемников, чтобы можно было использовать SUMD вместо SumH.
Какой протокол в приемнике использовать?
В первую очередь это зависит от вашего передатчика. Для коптеров, лично я предпочитаю PPM или SBUS — минимум проводов. Однако для гонок на дронах и для фристайла я предпочту SBUS, потому что у него меньше задержка при передаче.
Передача данных по радиоканалу: Spektrum DSM2 и DSMX
“Spektrum” часто упоминается в темах связанных с аппаратурой управления, это бренд специализирующийся на производстве аппаратуры управления. Ранее мы обсудили протоколы используемые для связи приемников с полетными контроллерами, но DSM2/DSMX — это протоколы общения между радиопередатчиком и приемником (используется в аппаратуре Spektrum).
Протокол передачи данных от приемника к ПК (копия SBUS) для Spektrum DSM2 называется SPEKTRUM1024, а для DSMX — SPEKTRUM2048.
Spektrum DSM2 and DSMX
DSM2 — это сигнал хорошо защищенный от помех, интерференции и от сигналов других передатчиков работающих на той же частоте. Кроме того, при включении радиопередатчик ищет запасную частоту, на случай, если будут проблемы на основной. Это снижает вероятность потери сигнала, однако, если обе частоты будут заняты или станут слишком шумными, то сигнал будет потерян.
DSMX — это улучшенная версия DSM2, использует ту же схему кодирования данных. Разница в том, что в случае DSMX, передатчик может за несколько миллисекунд перейти на новую частоту в случае проблем на основной, так что, теоретически, вы даже не заметите сбоя.
DSM2 — все еще очень популярная технология, если вы находитесь вдалеке от источников интерференции (например, микроволновки, wifi, беспроводные камеры видеонаблюдения), то он будет работать так же хорошо как и DSMX, но DSMX более надежен.
Spektrum Satellite
это дополнительная антенна и приемник, который обычно подключается к основному приемнику и используется для увеличения надежности приема сигнала, позволяя выбрать антенну с наилучшим сигналом.
Протоколы Frsky
Список доступных протоколов зависит от типа радиомодуля (англ,) и приемника:
История изменений
Протоколы в приемниках и передатчиках: PWM, PPM, SBus, DSM2, DSMX, SUMD : 4 комментария
Добавьте новый FPORT для FrSky
Спасибо за статью. Очень нужная информация для начинающих.
Спасибо, очень прояснилось.
Прекрасная статья, написанная профессионалом. Благодарю.
Протоколы PWM, PPM, SBUS, DSM2, DSMX, SUMD, что это и как работает

Для начала давайте определим значение аббревиатур, которые я буду использовать:
TX (от английского transmitter), то есть передатчик.
RX (от английского receiver), то есть приемник
В роли передатчика у нас выступает пульт, в роли приемника, черная коробочка, которая так и называется — приемник, он идет в комплекте с пультом и именно его вы устанавливаете в квадрокоптере. Приемник обрабатывает команды с пульта и отправляет их полетному контроллеру:
Когда начинается обсуждение протоколов, пилоты называют аббревиатуры PWM, PPM, SBUS, DSM2, DSMX, SUMD, именно их значение и принцип работы я раскрою в этой теме, а так же те RX и TX, где они работают.
Некоторые RX протоколы универсальны для использования на различных приемниках, а некоторые сделаны под конкретную марку. Ниже список, какой протокол поддерживается конкретной маркой:
Как видите, все более менее современные протоколы сделаны под конкретные марки производителей, универсальные только устаревшие протоколы.
У TX протоколов все тоже самое, протоколы, с помощью которых они общаются с приемником, также отличается для всех марок:
Протокол PWM – Pulse Width Modulation
Это базовый протокол радиосвязи, именно с него все и начиналось, также он и самый распространенный. В начале развития хобби авиамоделей, были только самолеты с сервоприводами и каждый сервопривод управлялся по PWM-протоколу и имел свой персональный канал. Но и сегодня такой способ используется.
Квадрокоптерам требуется не менее 4-5 каналов для нормальной работы.
PWM — это широтно-импульсная модуляция (ШИМ). Это аналоговый сигнал, где длительность импульса определяет действующее значение выходного напряжения и, тем самым, положение качалки сервопривода или положение рычажка газа. Длительность импульсов обычно варьируется от 1000 мкс до 2000 мкс (микросекунда), при этом 1000 мкс — это минимум и 2000 мкс — максимум. MfG (с)
Протокол PPM – Pulse Position Modulation
Этот протокол также называется CPPM или PPMSUM. Отличается от предыдущего тем, что для множества каналов (правда максимум для  нужен всего лишь 1 провод. А теперь посмотрите на фотку выше и ощутите разницу, один провод заменяет эту кучу. Нужно подключить только провод питания, сигнала и заземления, итого 3 провода, фото ниже:
нужен всего лишь 1 провод. А теперь посмотрите на фотку выше и ощутите разницу, один провод заменяет эту кучу. Нужно подключить только провод питания, сигнала и заземления, итого 3 провода, фото ниже:
Сигнал по проводу посылается друг за другом, но модулируется по-разному. Его называют «аналоговым сигналом временной области», по точности он немного уступает PWM, но его проще подключать и настраивать, к тому же, его поддерживают большинство полетных контроллеров.
Протокол PCM – Pulse Code Modulation
Этот протокол работает по принципу импульсной модуляции, принцип работы похожа на протокол PPM. PCM это уже цифровой сигнал, а PPM аналоговый, например. PCM умеет распознавать и исправлять ошибки в сигнале, однако, это еще немало зависит и от используемого оборудования.
Также, протокол PCM надежнее, чем аналоговые и менее восприимчив к помехам, но из-за этого ему нужен преобразователь сигнала, а это влечет за собой более высокую цену оборудования.
Последовательные протоколы (Serial)
Сюда входят SBUS, XBUS, MSP, IBUS, SUMD. Это цифровые протоколы, а значит не имеют потерь, для работы требуется всего 3 провода — сигнал, питание и заземление. Для подключения приемников с этими протоколами требуется последовательный порт на ПК.
Протокол SBUS (S.BUS, Serial BUS) – марки Frsky и Futaba
SBUS — этот протокол сделали для своей аппаратуры разработчики Frsky и Futaba и он поддерживает до 18 каналов.
Протокол SBUS — это инвертированный сигнал, который использует UART для последовательной передачи данных. На сегодня все современные полетные контроллеры, не говоря уже о поколении F7 имеют UART порт и отлично по нему работают с периферией, но для того, чтобы прочитать его, нужен инвертор, встроенный или внешний, а вот он уже есть не у всех. У Naze32 Rev5 инвертора нет, а в F3, Pixhawks инвертор уже встроен. Этот протокол хорош тем, что для его работы нужен 1 провод на все 18 каналов.
Протокол CRSF (Crossfire)
Фирма TBS разработала этот протокол для своей аппаратуры Crossfire. Это цифровой протокол с принципом работы как SBUS, но у него более быстрая скорость работы, позволяющая использовать Телеметрию без использования доп.портов. По этому протоколу даже можно настраивать полетный контроллер.
Протокол IBUS – марки Flysky
IBUS это протокол для аппаратуры фирмы FlySky, такой же цифровой «компактный» протокол, работающий в обе стороны, то есть по одному проводу можно управлять сервоприводами и получать данные с датчиков.
Протокол XBUS – марки JR
Такой же как IBUS, но для аппаратуры фирмы JR, имеет поддержку 14 каналов. Отличается от других наименьшей задержкой по времени между каналами.
Протокол MSP — марки Multiwii
Создан для оборудования фирмы Multiwii, поддерживает 8 каналов связи, в остальном такой же, как и все.
Протокол Graupner SUMD
Очередной цифровой протокол как Speksat и SBUS, у него тоже все каналы работают по 1 проводу исключая задержки, но у него есть ряд преимуществ:
Протокол Graupner SumH
Устаревший протокол фирмы Graupner. Компанией уже было выпущено обновление прошивки для приемников, чтобы те могли дальше работать на протоколе SUMD.
Протокол FPort — марки Frsky и Betaflight
Новейший протокол связи от разработчиков Frsky и Betaflight, направленный на еще более быструю работу и максимальную компактность, для работы принятия и обработки всех сигналов телеметрии и управления, ему нужен только 1 провод.Протокол совместим с полетниками F4 без аппаратных инверторов.
Он еще в процессе доработки, но у нас уже есть статья о нем: https://profpv.ru/что-такое-fport-frsky-и-как-настроить/
Какой выбрать протокол
Отвечая на этот вопрос, я скажу, что тут главное какое оборудование вы используете или будете использовать. Я рекомендую использовать PPM или SBUS, а если аппаратура FlySky, то естественно IBUS. Если вы собираете гоночный квадрокоптер, то используйте SBUS и IBUS протоколы, у них наименьшая задержка.
Протоколы передатчиков Spektrum: DSM2 и DSMX
Фирма спектрум специализируется на радиооборудовании для радио моделей. Их часто упоминают на форумах и сайтах. DSM2 и DSMX это протоколы свзяи передатчик-приемник, которые используются в оборудовании Spektrum.
Протоколы (копии SBUS) для Spektrum DSM2 называются SPEKTRUM1024, а для DSMX называется SPEKTRUM2048.
Протоколы Spektrum DSM2 и DSMX
Протокол DSM2 очень устойчивый к помехам как из вне, так и от помех создаваемых другими передатчиками. Еще он имеет крутую особенность — если на текущей частоте случается какой-то сбой, он тут же переключается на резервную, таким образом вы не потеряете управление над моделью.
DSMX это улучшенная версия протокола на основе DSM2, отличие лишь в том, что DSMX умеет переключаться на резервный канал за единицы миллисекунд, благодаря чему вы даже и не заметите какой-либо сбой.
На протоколе DSM2 нужно летать вдали от сетей Wi-Fi, микроволновок, беспроводных камер. DSMX это тоже самое, но чуть надежнее.
Spektrum Satellite
Это дополнительная антенна, которая подключается к пульту и усиливает мощность сигнала.
Протоколы передатчиков (пультов) Frsky
Название протокола зависит от того, какие модули и приемники используются с передатчиком:
Какая задержка у протоколов
Были протестированы несколько самых популярных приемников и составлен рейтинг приемников, ниже вы можете увидеть, какой приемник самый быстрый:
13,7 мс задержка конечно крутая, но это не самый главный критерий выбора аппаратуры, нужно также учитывать качество аппаратуры, качество соединений, особенности. Ниже таблица с тестированием:
RCDetails Blog
О коптерах и не только
Неинвертированный сигнал SBUS и SmartPort телеметрии на приемниках FrSky

В этом руководстве я покажу вам, как получить неинвертированный сигнал SBUS и SmartPort Telemetry в приемниках FrSky, включая R-XSR, XSR, X4R-SB и XM.
Зачем вообще нужен «неинвертированный сигнал»?
SBUS и SmartPort Telemetry — это инвертированный последовательный порт, данные с которого микроконтроллер напрямую распознать не способен.
В контроллерах серий F3 и F7 имеются встроенные аппаратные инверторы, так что вы можете подключить SBUS и Smart Port к любому доступному последовательному порту (UART) и всё это будет работать. Однако ситуация меняется при использовании ПК на F1 или F4, им требуется неинвертированный сигнал, либо инвертированный сигнал нужно инвертировать еще раз.
Ранее (во времена Naze32) внешние инверторы требовались для подключения приемника к полетному контроллеру. В настоящее время многие современные ПК на F4 имеют встроенные инверторы для SBUS, например, Kakute F4.
Однако, если у вашего полетного контроллера нет встроенных инверторов для SBUS и S.Port, тогда придется использовать внешние инверторы, и это руководство может вам помочь.
В этой статье мы покажем откуда можно получить оригинальный, неинвертированный сигнал на приемнике (до инверсии) и вы сможете припаять ПК к приемнику напрямую.
Если вы не знаете как настроить SBUS и SmartPort в Betaflight/Cleanflight, тогда вот вам инструкция.
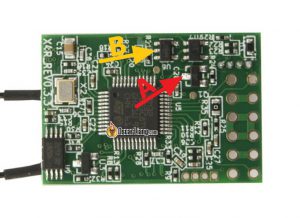
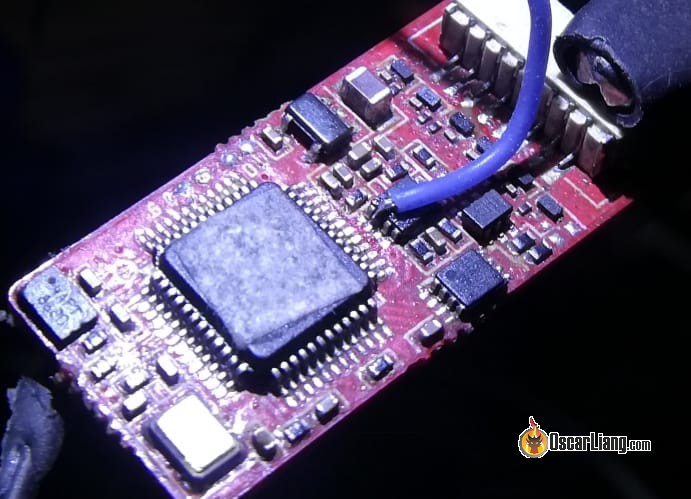
X4R-SB

В приемнике Frsky X4R-SB неинвертированный сигнал SBUS можно взять с контакта «А» чипа, показанного на картинке, либо с контакта «А» расположенного с краю платы.

Smart Port
При использовании Betaflight, Cleanflight и некоторых других прошивок для ПК (англ.), всё что требуется — это подключиться к контакту «А» (красный). Просто подпаяйте один проводок к этому контакту, а другой конец подключите к TX свободного последовательного порта на ПК.
Однако, некоторых прошивки требуют также подключения второго контакта («B» — желтый, средний из трех контактов детали) к контакту RX того же самого последовательного порта.

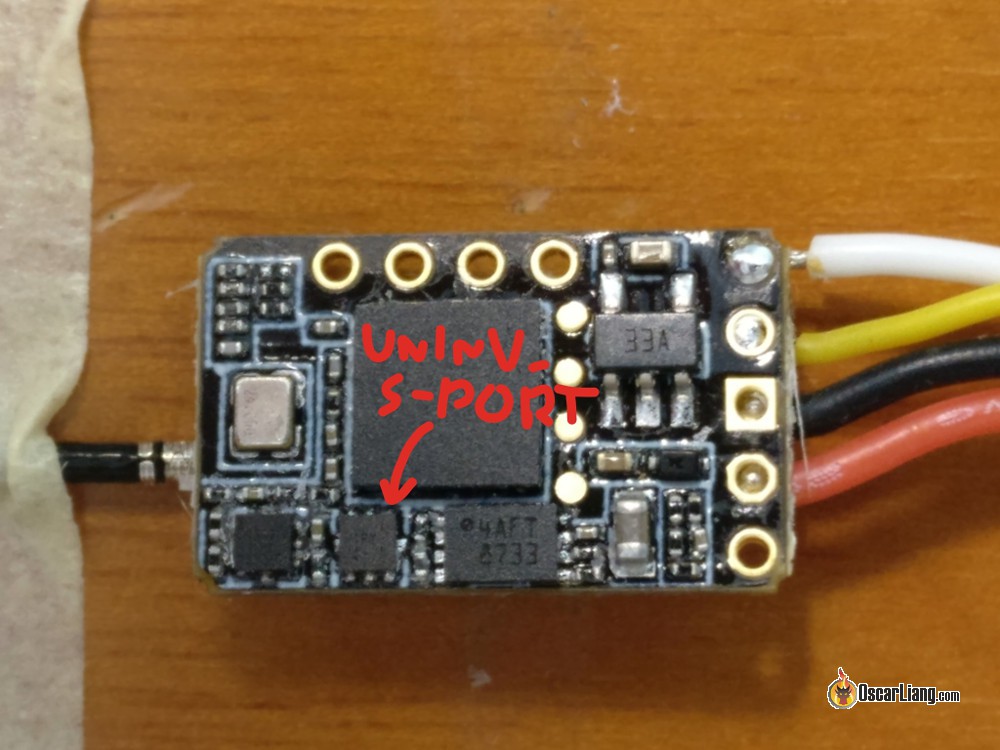
Как и для X4R-SB неинвертированный сигнал расположен посередине детали.

Smart Port
Как и в случае с X4R-SB, для Betaflight и Cleanflight, всё что потребуется — это один контакт «А» (красный). Просто подключите его к TX свободного порта на ПК.
Для других прошивок возможно потребуется (а возможно, что и не потребуется) второй контакт — «B» (желтый), средний из трех контактов, его нужно подключить к RX того же порта. Попробуйте это решение, если есть проблемы с S.Port, а дальше проконсультируйтесь с техподдержкой прошивки.

XM+ (PLUS)

У XM+ нет SmartPort телеметрии, только SBUS.
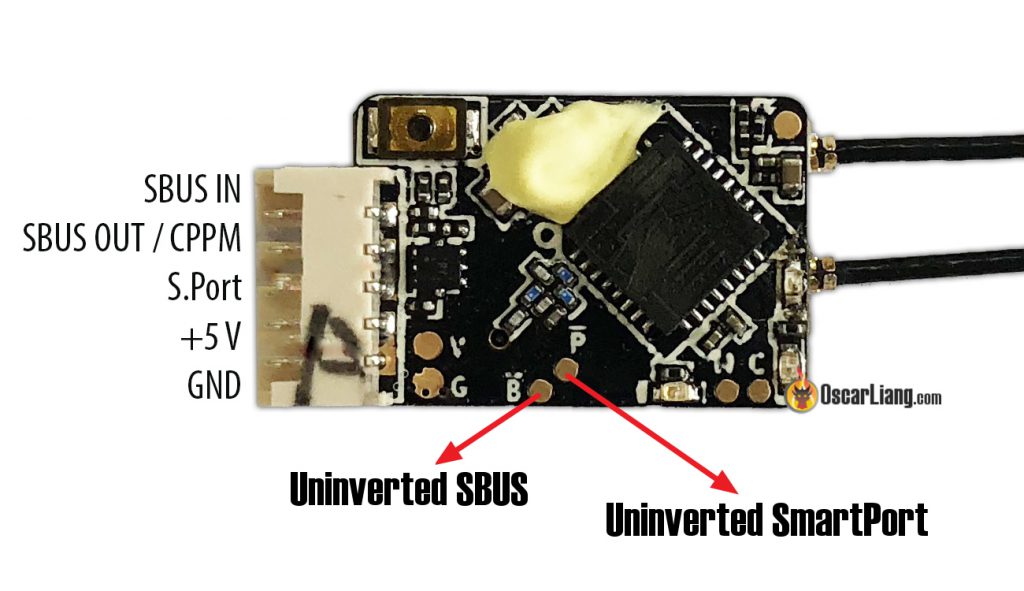
Неинвертированный SBUS можно взять тут:


У XM нет Smart Port телеметрии, только SBUS, неинвертированный сигнал берется тут:

Неинвертированный сигнал S.Port показан красным кружком. Этот контакт обнаружил, кто-из моих друзей в Facebook, сам я это ещё не тестировал.
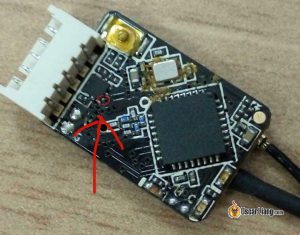
В новых партиях приемника появилось 2 новых пятака для: неинвертированного SBUS и для неинвертированного Smart Port, так что теперь с ними будет проще работать.
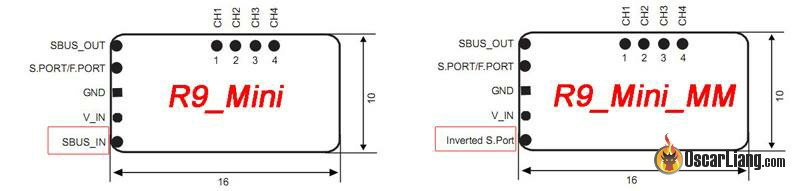
R9 Mini
Спасибо Дэвиду (David Marzocca), он нашел неинвертированный SmartPort на оригинальном приемнике R9 Mini. Этот вариант я сам лично не тестировал, так что делаете всё на свой страх и риск.
R9 MM
R9 MM — это новая версия R9 Mini. Единственное различие — теперь R9 MM имеет неинвертированный SmartPort (но в FrSky его все равно называют Inverted S.Port, так что не запутайтесь). Он заменил контакт SBUS_IN.
Это решение позволяет избежать кучи проблем, которые можно создать самому себе пайкой мелких проводков. Купить R9MM можно тут:
R9 Slim
Спасибо AJ Karki за эту картинку. Судя по тому что он пишет — это неинвертированный сигнал SBUS. Чтобы проще было припаять, используйте эмалированный (обмоточный) провод, и для надежности залейте клеем место пайки.
Этот вариант я сам лично не тестировал, так что делаете всё на свой страх и риск.
История изменений
Неинвертированный сигнал SBUS и SmartPort телеметрии на приемниках FrSky : 15 комментариев
Не примите за дерзость, я хочу разобраться сам и что бы другим было понятно.
Я читаю и немного недоумеваю… Допустим есть ПК Омнибас Ф4.
По словам автора, например, — «Неинвертированный SBUS/в приёмнике таком то/ можно взять тут»
Так мы на этот «тут» подаём сигнал с Тх ПК или что то снимаем оттуда?
И ещё, можно ли использовать внешние инверторы?
SBUS — это сигнал от приемника к ПК, подключается к RX на плате ПК.
По сути это обычный последовательный порт, но сигнал там инвертирован (именно в этом и проблема).
Чтобы ПК распознал этот сигнал его нужно еще раз инвертировать (т.е. вернуть к первоначальному виду), это можно сделать разными способами:
— у F3 есть встроенные инверторы (поэтому подключать SBUS можно к любому порту),
— у F4 встроенных нет, но разработчики некоторых плат их встраивают (т.е. они доступны не на всех портах)
если встроенного инвертора нет, тогда:
— можно поставить внешний
— найти на приемнике точку где есть неинвертированный сигнал, т.е. мы берем оттуда оригинальный сигнал
Подскажите где не инвертированный с порт на R9 Slim +?
К сожалению, не знаю.
Да, все верно, спокойно покупайте.
Есть несколько версий 🙂 где правда — достоверно не знаю:
1. это была такая своеобразная «защита» от реверс инжиниринга и копирования, разработанная Футабой
2. лучше помехозащищенность
3. меньше потребляемый ток (ну тут вообще должна быть копеечная разница)
Ну вроде потихоньку отходим от этого безобразия.
Не силен во FlySky, но вроде бы их iBUS — это типа неинвертированная версия SBUS.
Подскажите, есть на приемнике Jumper R8 откуда взять неинвертированный sbus или придётся делать инвертер?



