Лучшие настройки чувствительности PUBG Mobile
Чтобы уничтожать врагов быстро и не беспокоиться за то, что у вас прицел уведет слишком далеко, надо настроить чувствительность и привыкнуть к ней. Мы собрали основные факторы настройки чувствительности, от которых можно отталкиваться при кастомизации.
Мы рекомендуем выделить под настройку сенсы целый день. Потому что за сутки вы вполне сможете привыкнуть к новым настройкам, что-то поменять под себя, а после отправиться в матчмейкинг уничтожать соперников
И все-таки, лучшими настройками можно назвать только те, с которыми вам удобно играть. С которыми вы чувствуете себя комфортно и можете смело бросаться в трудные ситуации, зная, что у вас хватит реакции и правильных настроек для убийства врага.
Максимально удобная чувствительность: настройка
Прежде, чем вы будете сбивать свой конфиг, сделайте скриншот экрана, чтобы в случае чего вернуть свои настройки назад.
Настройки камеры в PUBG Mobile
Настройки камеры, как и настройки чувствительности на разных прицелах, также невероятно важны. Разберем и их.
Детальная настройка камеры
Каждая из настроек включает в себя одни и те же пункты, которые надо настраивать индивидуально. Настройка камеры, если дословно, влияет на то, как быстро будет меняться изображение на экране (поворот) во время простого смахивания пальцем по экрану без стрельбы.
Этот параметр никак нельзя настраивать в таком же процентном показателе, как во время стрельбы, поскольку это абсолютно разные действия.
Мы предлагаем сделать такие настройки:
ADS настройки
Однако настройки изменяются совсем немного.
Чувствительность гироскопа
Этот тип чувствительности да и камеры в принципе работает только в том случае, если в настройках вы включили гироскоп. Он будет полезен игрокам, у которых есть возможность использовать телефон (наклон и поворот) для направления прицела.
В настройках чувствительности гироскопа многие параметры сильно завышены, однако они легко подстраиваются под ваш телефон и вас индивидуально. Поставьте эти настройки, и отталкивайтесь от них во время регулировки в тестовом матче.
Настройки чувствительности для каждого прицела по отдельности
Все прицелы нуждаются в пояснении собственной чувствительности: почему такие цифры и чем они отличаются между собой.
Коллиматорный, помощь в наведении (красная точка) — 70-80%
Выше мы написали, что лучше выставить 70-80% чувствительности, а потом, в тренировочном матче, её отредактировать. Такая сенса устанавливается для контроля отдачи на штурмовых винтовках. Желательно попрактиковаться 10-20 минут с такой чувствительностью.
Прицел 2х — 40%
Если вблизи, с коллиматорным прицелом, вам нужна резкость поворота камеры, чтобы быстрее навестись на противника, который находится рядом с вами, то прицел 2х ставится на пушки с предпочтением боя на средней дистанции. Поэтому здесь мы сильно уменьшаем чувствительность.
Прицел на 3х и 4х — 27% и 25%
Эти прицелы хорошо сочетаются с винтовками и также применяются на дальней дистанции. Желательно выставить следующие настройки:
Прицел 6х и 8х — 22 и 11.
Прицелы с кратностью 6х и 8х — это бой на дальней дистанции, причем опытными игроками он нередко используется для того, чтобы загнать противника в ловушку к другим игрокам или союзникам, расстреливающим врагов с обычного коллиматора.
Выставляем следующие настройки:
Использование гироскопа
У гироскопа есть свои плюсы и минусы.
Но плюсы перевешивают минусы:
Также, если у вас относительно новый телефон (выпуск после 2018-2019 года), то проблем с гироскопом быть не должно относительно технической части. Он будет работать исправно, и остается только привыкнуть к нему.
Как включить гироскоп и кому он подходит
Гироскоп включается в настройках по такому пути:
Он точно пригодится игрокам:
Помните, что к любым изменениям, будь то включение гироскопа или изменение чувствительности мыши, стоит быть готовым. Нельзя кардинально изменять настройки игры и сразу приступать к играм против реальных людей. Практикуйтесь, изменяйте чувствительность во время игры, старайтесь сделать конфиг (настройки) идеально под себя, чтобы больше никогда к ним не возвращаться
Подвижная кнопка огня
Подвижная кнопка огня становится для многих игроков проблемой, поскольку она создает вторую кнопку прицеливания и стрельбы на экране в тот момент, когда у вас от испуга или из-за резкого поворота появляется необходимость смотреть в другую сторону.
Рекомендуется отключить подвижную кнопку огня в том случае, если у вас небольшой экран, а также, если вы постоянно путаетесь в передвижении и стрельбе в сложных ситуациях
Что значит чувствительность гироскопа ads

Поле зрения и чувствительность ввода
Мы собрали информацию о показателях поля зрения (далее — «п/з») и чувствительности ввода в PC-версии игры, чтобы каждый мог вести стрельбу комфортно.
Тип прицела Модификатор (-%)
Гологр. прицел 0,9 (-10%)
«Зрачок»*** (OTs-03) 0,3 (-70%)
Лаз. целеуказатель 0,9 (-10%)
*** Для винтовки OTs-03 есть два прицела, и модификатор будет зависеть от того, какой из них используется.
Расчет измененного п/з
Используя подходящий модификатор, мы можем рассчитать итоговый показатель п/з.
Формула П/з x модификатор прицела = измененный показатель п/з
П/з П/з в меню настроек экрана. Требуется значение от
Optic Modifier (модификатор прицела) Используйте один из модификаторов, представленных выше.
Измененный показатель п/з Таким будет значение п/з, если учесть
модификатор (верно лишь в режиме ADS).
Приведем примеры использования формулы:
ACOG (п/з = 90) 90 x 0,35 = 31,5
OTs-03 + зерк. прицел (п/з = 60, «Зрачок» включен) 60 x 0,3 = 18
OTs-03 + зерк. прицел (п/з = 60, «Зрачок» отключен) 60 x 0,9 = 54
Зерк. прицел (п/з = 75) 75 x 0,9 = 67,5
Разобравшись с принципом расчета п/з, можем поговорить о чувствительности ввода.
Ниже приведены переменные, участвующие в расчете чувствительности ввода, их краткое описание и способы изменения. Этот раздел поможет разобраться в формулах.
Впредь под «ADS» следует понимать только «режим с использованием прицела» и не путать эту аббревиатуру с аналогичной переменной «Aim Down Sights».
Переменная Где ее изменить
Значение по умолчанию Описание
Input Yaw (поворот влево-вправо) н/д н/д Это угловое движение относительно вертикальной оси.
Input Pitch (наклон вверх-вниз) н/д н/д Это угловое движение относительно горизонтальной оси.
MouseSensitivityMultiplierUnit GameSettings.ini 0,02 Это модификатор, используемый в настройках чувствительности.
Mouse Sensitivity Horizontal Настройки управления
(«Клавиатура и мышь») 50 Это чувствительность по горизонтали в пределах от
1 до 100 (включительно).
Иногда этот показатель также называют «Yaw».
Mouse Sensitivity Vertical Настройки управления
(«Клавиатура и мышь») 50 Это чувствительность по вертикали в пределах от
1 до 100 (включительно).
Иногда этот показатель также называют «Pitch».
Aim Down Sights Настройки управления
(«Клавиатура и мышь») 50 Это чувствительность при ADS в пределах от
1 до 100 (включительно).
Эта переменная позволяет подсчитать итоговый модификатор
чувствительности по вертикали и горизонтали
XFactorAiming GameSettings.ini 0,02 Это модификатор, используемый с настройками
Optic Modifier (модификатор прицела) н/д н/д Это модификатор, зависящий от используемого прицела и влияющий на переменную
при подсчете итогового модификатора
«Aim Down Sights». Ниже приведена подробная информация.
Подсчеты при стрельбе навскидку
Используя переменные, приведенные выше, можно рассчитать чувствительность мыши при стрельбе навскидку. Мы используем следующие формулы:
Input Yaw (навскидку) = Input Yaw x (MouseSensitivityMultiplierUnit x Mouse Sensitivity Horizontal)
Input Pitch (навскидку) = Input Pitch x (MouseSensitivityMultiplierUnit x Mouse Sensitivity Vertical)
Подсчеты при ADS
При ADS в расчетах участвуют модификаторы, приведенные ниже. Правила для типов прицелов, применяемые для п/з, действуют и в этом случае. Формулы будут следующими:
Тип прицела Модификатор (-%)
Гологр. прицел 0,6 (-40%)
Лаз. целеуказатель 0,6 (-40%)
Модификатор ADS = min(max((Aim Down Sights x XFactorAiming) x Optic Modifier), 0), 1)
Input Yaw (при ADS) = Input Yaw (навскидку) x модификатор ADS
Input Pitch (при ADS) = Input Pitch (навскидку) x модификатор ADS
Изменение точности шага ползунка – стрельба навскидку
Для ползунков настройки чувствительности мыши по горизонтали и вертикали используются значения от 1 до 100: по умолчанию оно равно 50. Произведение этого значения и переменной MouseSensitivityMultiplierUnit (по умолчанию — 0,02) даст нам модификатор, который поможет рассчитать чувствительность при стрельбе навскидку. Пример:
Значение ползунка (50) x MouseSensitivityMultiplierUnit (0,02) = 1
Изменение значения ползунка повлияет на чувствительность в игре. Например, при значении 100 чувствительность увеличится вдвое, а при значении 1 она установится в районе 2%.
Некоторые игроки предпочитают увеличивать точность при низком показателе чувствительности. Этого можно достичь, изменив переменную MouseSensitivityMultiplierUnit, значение которой по умолчанию равно 0,02. Напоминаем, что искать эту переменную нужно в файле gamesettings.ini. Например, если изменить значение на 0,01 и оставить ползунок на значении 1, то от изначального показателя останется всего 1%. Точность увеличится вдвое, но камера будет смещаться медленнее даже при максимальных усилиях. Изменение этих значений позволит настроить управление исходя из своих предпочтений.
Тем, кому удобнее подстраивать чувствительность с помощью физических измерений, стоит обратить внимание на переменную MouseSensitivityMultiplierUnit. Чтобы определить подходящее значение, сначала нужно установить расстояние, которое будет использоваться.
Для примера установим значение чувствительности по горизонтали на 10 и возьмем 30 см как желаемое расстояние для поворота оперативника на 360 градусов (текущее значение в игре — 31 см).
Для начала возьмем желаемое значение и разделим на текущее значение, чтобы получить модификатор.
Желаемое (30 см) / текущее (31 см) = 0,968
Теперь подсчитаем произведение значения чувствительности и значения MouseSensitivityMultiplierUnit:
10 x 0,02 = 0,2
Это значение используется для расчета Input Yaw (навскидку). Теперь подсчитаем произведение последнего полученного значения и модификатора расстояния:
0,2 x 0,968 = 0,1936
Этот результат (0,1936) — то, что мы хотим получить при умножении переменной MouseSensitivityMultiplierUnit на новое значение ползунка чувствительности. Для этого нам потребуется рассчитать новое значение для MouseSensitivityMultiplierUnit. И это просто: достаточно разделить 0,1936 на желаемое значение чувствительности ползунка. В этом примере мы возьмем значение ползунка по умолчанию (50), но вы можете выбрать любое от 1 до 100.
0,1936 / 50 = 0,003872
Теперь, если вы установите значение 0,003872 для переменной MouseSensitivityMultiplierUnit и значение чувствительности ползунка 50, то расстояние для поворота на 360 градусов составит 30 см. Следуя этому примеру, вы можете изменить настройки, чтобы получить максимально точный результат, недостижимый при использовании стандартных ползунков в меню.
Изменение точности шага ползунка – ADS
Изменение значений ползунков для ADS немного отличается от аналогичного процесса для стрельбы навскидку. В этом случае требуется изменить значение переменной XFactorAiming, а не MouseSensitivityMultiplierUnit. Помните, что настройки ADS будут применяться как модификаторы для чувствительности стрельбы навскидку. Также на чувствительность будет влиять и тип прицела (см. схему «Optic Modifier»).
В первом примере мы рассмотрим настройки стрельбы навскидку без модификаторов. Если используется прицел с 1-кратным увеличением (мушка, зеркальный, лазерный целеуказатель и др.), модификатор будет равен 0,6, настройка ADS — 50, а переменная XFactorAiming — 0,02. Используя эти значения, получим: min(max(50 x 0,02) x 0,6, 0, 1) = 0,6. Получается, что скорость при ADS на 40% ниже, чем при стрельбе навскидку.
Теперь предположим, что игрок предпочитает использовать ACOG, но скорость прицеливания при ADS ему кажется низкой. Он бы хотел получить такой же результат, как и при использовании прицелов с 1-кратным увеличением. Сначала рассчитаем модификатор для ползунка или XFactorAiming. Для этого желаемое значение следует разделить на текущее (0,6 / 0,35 = 1,715). Как говорилось ранее, мы можем изменить либо значение ползунка, либо значение переменной XFactorAiming. Рассмотрим оба варианта.
Ползунок
В этом случаем умножим значение ползунка на только что рассчитанное значение модификатора (50 x 1,715 = 85,75). Дробные значения не подходят, поэтому будем использовать 85 или 86 — они ближе всего к желаемому результату.
XFactorAiming
Те, кто предпочитает изменять переменную XFactorAiming, могут добиться более точных результатов. Расчет здесь такой же, как и для ползунка, но в ход идет значение XFactorAiming.
0,02 x 1,715 = 0,0343
Произведение (0,0343) — новое значение для переменной XFactorAiming. Теперь возьмем исходную формулу и получим результат:
min(max(50 x 0,0343) x 0,35, 0, 1) = 0,60025
min(max(50 x 0,0343) x 0,6, 0, 1) = 1
Выходит, скорость прицеливания при использовании прицела с 1-кратным увеличением будет такой же, как при стрельбе навскидку (ранее — на 40% ниже).
Надеемся, что эта информация окажется полезной для тех, кто хочет изменить чувствительность прицеливания в игре! Если хотите задать вопрос или оставить отзыв, посетите форумы и Reddit.
Сравнение характеристик микромеханических гироскопов
Введение
Погрешности микромеханических гироскопов
Первое, что бросается в глаза разработчикам в даташитах к датчикам, это так называемая «стабильность нуля». Ведь кажется, что именно этот параметр в конечном итоге определяет чувствительность датчика, т.е. минимальное входное воздействие, которое датчик почувствует. Так из-за низкой стабильности нуля многих моделей ММГ, до сих пор многие считают, что микромеханические гироскопы (ММГ) не чувствуют вращение Земли. Есть модели ММГ имеющие стабильность нуля немногим более 2 °/час (Земля, как известно вращается со скоростью 15 °/час). Но на практике это не означает, что измерить вращение Земли все-таки удастся.
Как бы то ни было, разработчик смотрит на стабильность нуля. Это понятный параметр, показывающий в каких пределах будет колебаться нуль шкалы датчика в лабораторных условиях. Однако это параметр стабильности «сферического коня в вакууме». В реальности заявленной стабильности не будет. Почему? Да потому, что там указана стабильность (вернее нестабильность) обусловленная внутренними источниками погрешностей. В каких условиях датчик будет работать производитель не сможет предугадать, как и вызванные этими условиями девиации.
Есть два подхода борьбы с погрешностями: аппаратный и алгоритмический (читай программный). Второй подход подразумевает добавление в прошивку БЦЭВМ специальных программных модулей для коррекции ошибок, вызванных паразитными процессами. И этот подход не рекомендуется как оптимальный. В первую очередь сам датчик должен гасить шумы. Центральный мозг должен заниматься не вычищением основного мусора, а финишной обработкой и обсчетом высокоуровневых алгоритмов (навигация, стабилизация, автоматизация). Есть разного рода методические погрешности. Они легко описываются некими формулами, вот их легко компенсировать программно.
К чему все это? А к тому, что правильнее выбрать датчики, оптимальные с точки зрения соотношения цены к точностным характеристикам. И тут главными параметрами выбора будет скорее всего чувствительности гироскопа к линейному ускорению (g-чувствительность) и вибрациям (g²-чувствительность). Почему они главные объясняется ниже.
Температурный гистерезис нуля
Погрешности из-за вибраций
Если дрифт постоянный и всегда в одну сторону — это всего лишь говорит о неправильной калибровке 0. В MultiWii 0 гир калибруется при каждом включении, но неидеально (округляется до целого), если ввести хотя бы десятые становится намного лучше. Но в данном применении гироскопа, даже ощутимый дрейф не страшен, так как есть референсная ориентация (компасс и акселерометр) по которой он исправляется.
Выводы
Заключение
Хотел сделать пост, содержащий две части — 1) Обоснование выбора критерия сравнения и 2) Сравнение по ТТХ моделей от Analog Devices Inc., Silicon Sensing, Sensonor и STMicroelectronics. Однако и так получилось «многабукв». Если будет интересно, постараюсь в скором времени сравнить по даташитам датчики упомянутых фирм с разъяснением о физическом смысле основных характеристик.
UPD: поправлены некоторые опечатки и грамматические ошибки.
Лучшие настройки гироскопа в Call of Duty: Mobile
Call of Duty: Mobile — одна из самых захватывающих игр, которая предлагает изысканный игровой опыт на мобильных устройствах. Освоение игры требует большого количества навыков, а улучшить их можно, выбрав соответствующие настройки. Среди всех настроек игры чувствительность гироскопа является одной из самых важных, которая может существенно повлиять на общий игровой процесс.
Кто не знает, датчик гироскопа в смартфоне отслеживает движение устройства и помогает игрокам Call of Duty: Mobile перемещаться по горизонтали и вертикали без использования больших пальцев. Хотя поначалу освоить гироскоп непросто, в конечном итоге он становится одним из лучших способов игры в Call of Duty: Mobile.
Поэтому в этой статье мы привели лучшие настройки чувствительности для игроков COD Mobile, которым интересно переключиться в режим гироскопа.
Лучшие настройки гироскопа в COD Mobile
Прежде чем начать, необходимо включить опцию Гироскоп. Перейдите в Настройки в Call of Duty Mobile и включите параметр Гироскоп на вкладке Основные. Как только вы включите его, вы сможете продолжить.
Вот лучшие настройки гироскопа, которые игроки могут использовать в Call of Duty: Mobile:
Это только рекомендуемые настройки, и перед началом матча необходимо потренироваться в режиме тренировки с новыми настройками. Игроки также могут немного изменить их в соответствии со своими личными предпочтениями для более точного прицеливания.
Также посмотрите это видео на YouTube, откуда мы взяли вышеупомянутые настройки.
Автор: Александр Орлов
MEMS-акселерометры и гироскопы — разбираемся в спецификации
“Хьюстон, у нас проблемы”, — устало раздалось в мозгу, пытающемся в ночи продраться сквозь Datasheet IMU MPU-9250 от InvenSense. Когда все слова в отдельности понятны, но взаимосвязь их запутана до невозможности. Началось всё с параметра LSB, про который я только смутно помнила, что в переводе это Least Significant Bit. Дальше пошли “Resolution”, “Sensitivity”, а ещё дальше я поняла, что получающийся текст уже можно озаглавить “Datasheet для чайников”.
Немного об основных блоках инерционного модуля.
MEMS-гироскоп
Трёхосевой MEMS-акселерометр
Использует для каждой оси отдельную пробную массу, которая смещается при возникновении ускорения вдоль данной оси (фиксируются емкостными датчиками). Архитектура MPU-9250 снижает подверженность температурному дрейфу и вариациям электропараметров. При расположении устройства на плоской поверхности оно измерит 0g по X- и Y-осям и +1g по Z-оси. Масштабный коэффициент (scale factor — отношение изменения выходного сигнала к изменению выходного измеряемого сигнала) калибруется на заводе и не зависит от напряжения питания. Каждый сенсор снабжен индивидуальным сигма-дельта АЦП (состоит из модулятора и цифрового фильтра низких частот, подробнее про устройство в [Easyelectronics]), выходной цифровой сигнал которого имеет настраиваемый диапазон измерений.
И сразу про трёхосевой MEMS-магнетометр
Итак, что такое LSB?
Как этот LSB посчитать? Инструкция по добыче

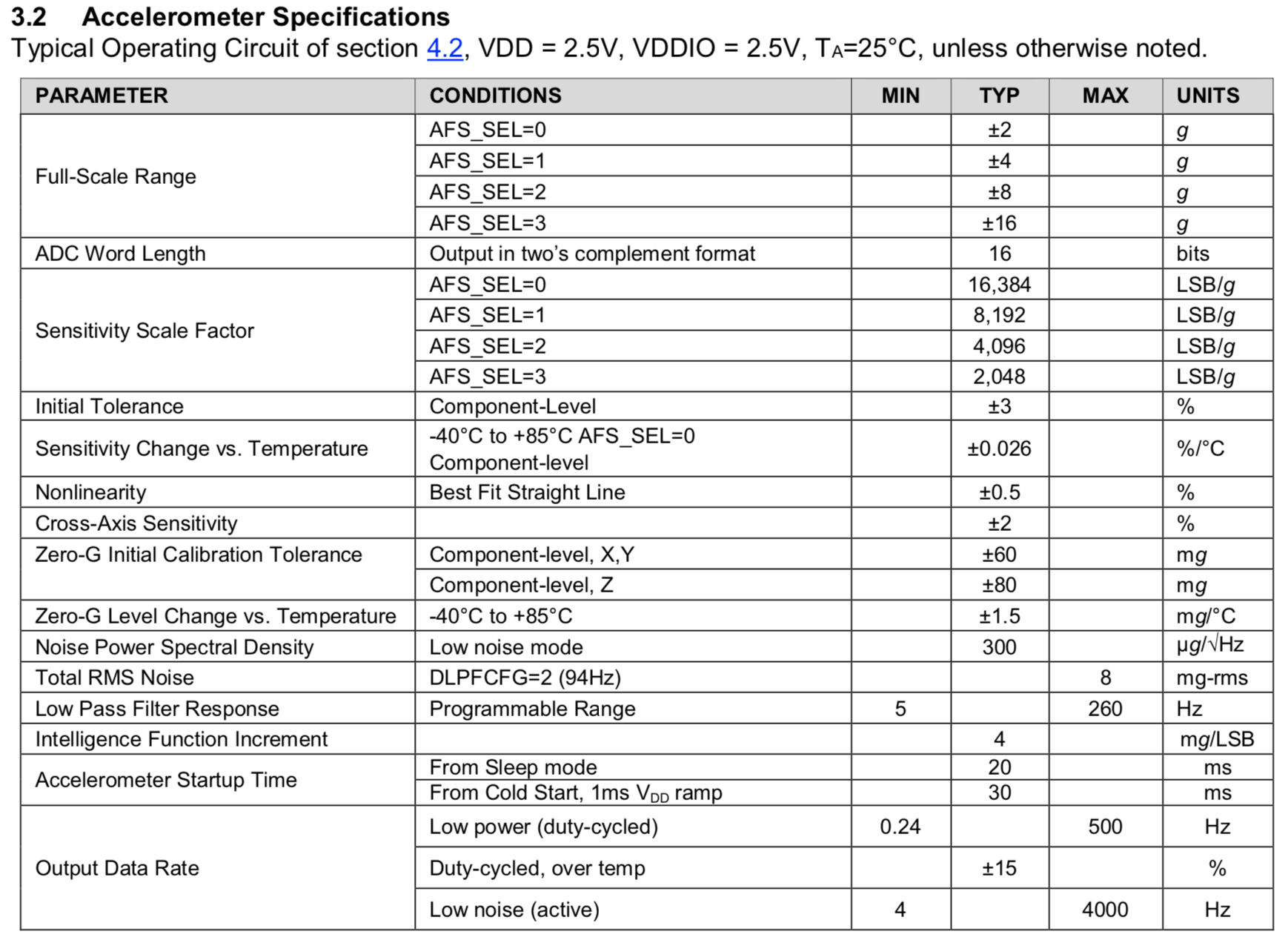
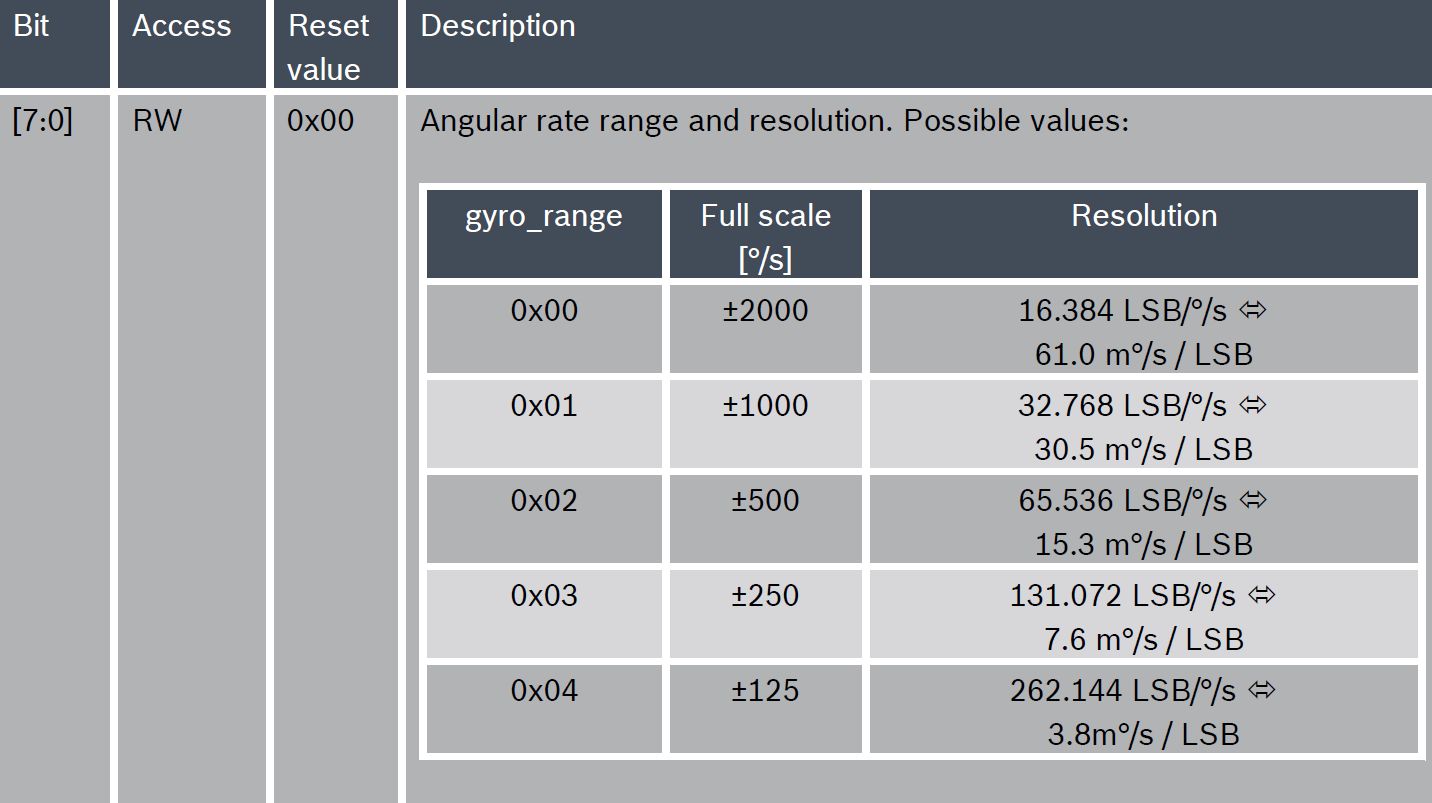
Варианты FS вытаскиваем из спецификации на гироскопы и, чтобы дважды не вставать, акселерометры.

По факту, вроде бы, получается, что это должен быть LSB. Но почему тогда мы видим одно значение вместо нескольких, завязанных на конкретные диапазоны? Пришлось расширять список исследуемых источников в поисках ответов.

Что такое разрешение (Resolution)?
Минимальная величина, которую достоверно видит датчик, крайне важная при попытке соблюсти баланс между ценой и производительностью. Это не точность — сенсор с высоким разрешением может быть не особо точным, равно как и сенсор с малым разрешением в определённых областях может обладать достаточной точностью. К сожалению, LSB определяет лишь теоретическое минимально-различимое значение при условии, что мы можем использовать все 16 бит АЦП. Это разрешение в цифровом мире. В аналоговом какая-то часть ступеней будет зашумлена и число эффективных бит будет меньше.
Какие бывают характеристики шума и откуда что берётся?
Среднеквадратичное значение шумов во всём спектральном диапазоне — Total RMS (Root mean square) Noise
Ускорения или угловые скорости вращения меньше уровня широкополосного шума будут неразличимы — вот и фактическое разрешение. Среднеквадратичное значение переменного напряжения или тока (часто называется действующим или эффективным) равно величине постоянного сигнала, действие которого произведёт такую же работу в активной (резистивной) нагрузке за время периода. Наиболее эффективен такой подход при оценке широкополосного шума, где доминирует белый шум.

В узкой низкочастотной полосе 0.1-10 Гц основную роль играет фликкер-шум “1/f”, для оценки которого используют значение размаха шумового сигнала (peak-to-peak).
Спектральная плотность
Мощность – скорость поступления энергии. Через энергию определяются детерминированные и непериодические сигналы. Периодические и случайные сигналы выражаются через мощность, поскольку они не ограничены по времени и, соответственно, энергии, при этом в любой момент времени их средняя мощность отлична от нуля
Можно вспомнить [Sklyar], что произвольный периодический сигнал выражается через комбинацию бесконечного числа гармоник с возрастающими частотами:
$$display$$x(\lambda ) = \frac
что после представления косинуса и синуса в экспоненциальной форме
В общем случае эти коэффициенты представимы следующим образом:
$$display$$|c_n|=\frac<1><2>\sqrt
Спектральная плотность мощности случайного сигнала определяется через предел
и описывает распределение мощности сигнала в диапазоне частот.
Поскольку мы предполагаем, что среднее для белого шума датчиков в неподвижном состоянии равно нулю ($inline$\overline x = \overline x^2 = 0$inline$), то квадрат среднеквадратического значения равен дисперсии и представляет собой полную мощность в нормированной нагрузке:
Чуть подробнее про выбор полосы пропускания
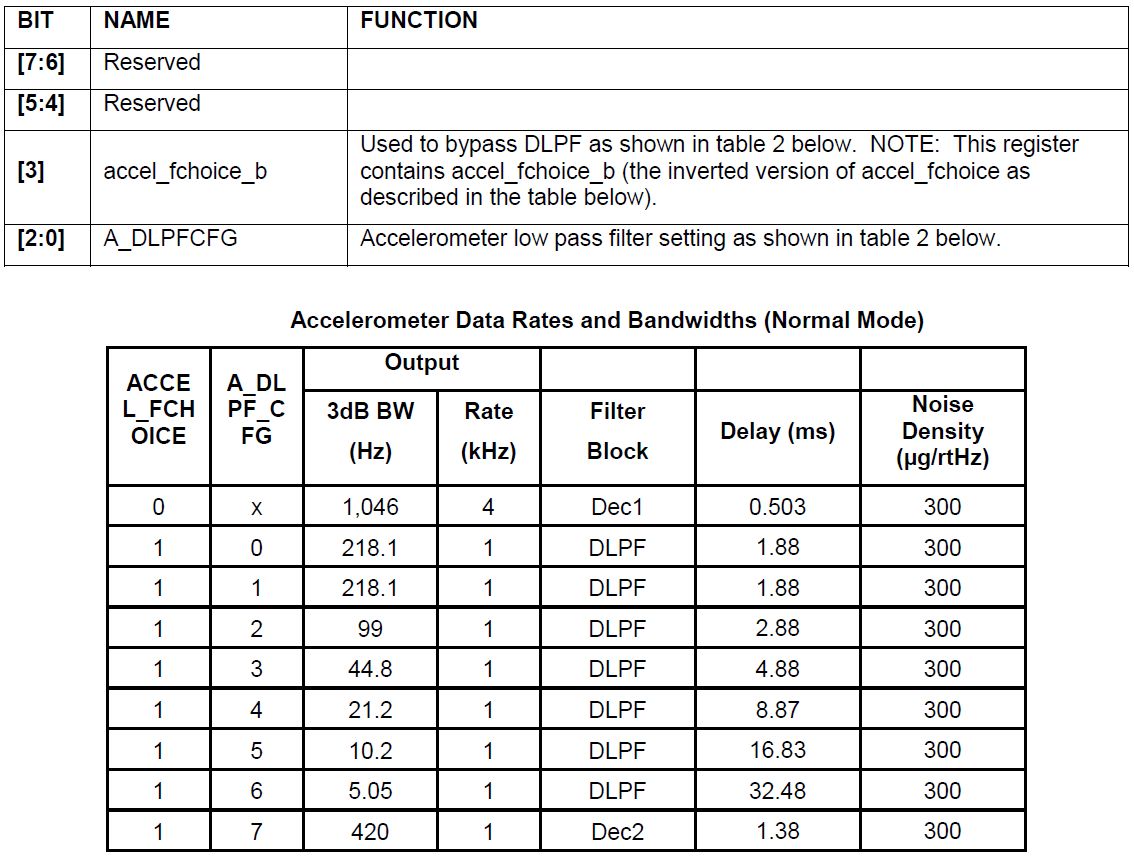
На выходе MEMS-датчика мы получаем сигналы разной частоты. Предполагается, что мы заранее имеем некое представление об измеряемых нами процессах. К примеру, при определении вектора ускорения дрона шумом являются вибрации аппарата. Отделить их от полезного сигнала можно с помощью фильтра низких частот, который обрежет все частоты выше указанной (к примеру, 200 Гц). MPU-9250 предоставляет возможность настроить частоту среза фильтра низких частот с помощью параметра с магическим названием DLPFCFG. Расшифровывается он как Digital Low Pass Filter Configuration. Далее в спецификации там и тут всплывали не менее загадочные выражения типа (DLPFCFG = 2, 92Hz), но за расшифровкой пришлось лезть в другой документ, “Register Map and Descriptions”. Там показано, какие наборы битов в какие регистры надо записать для достижения желаемых эффектов:
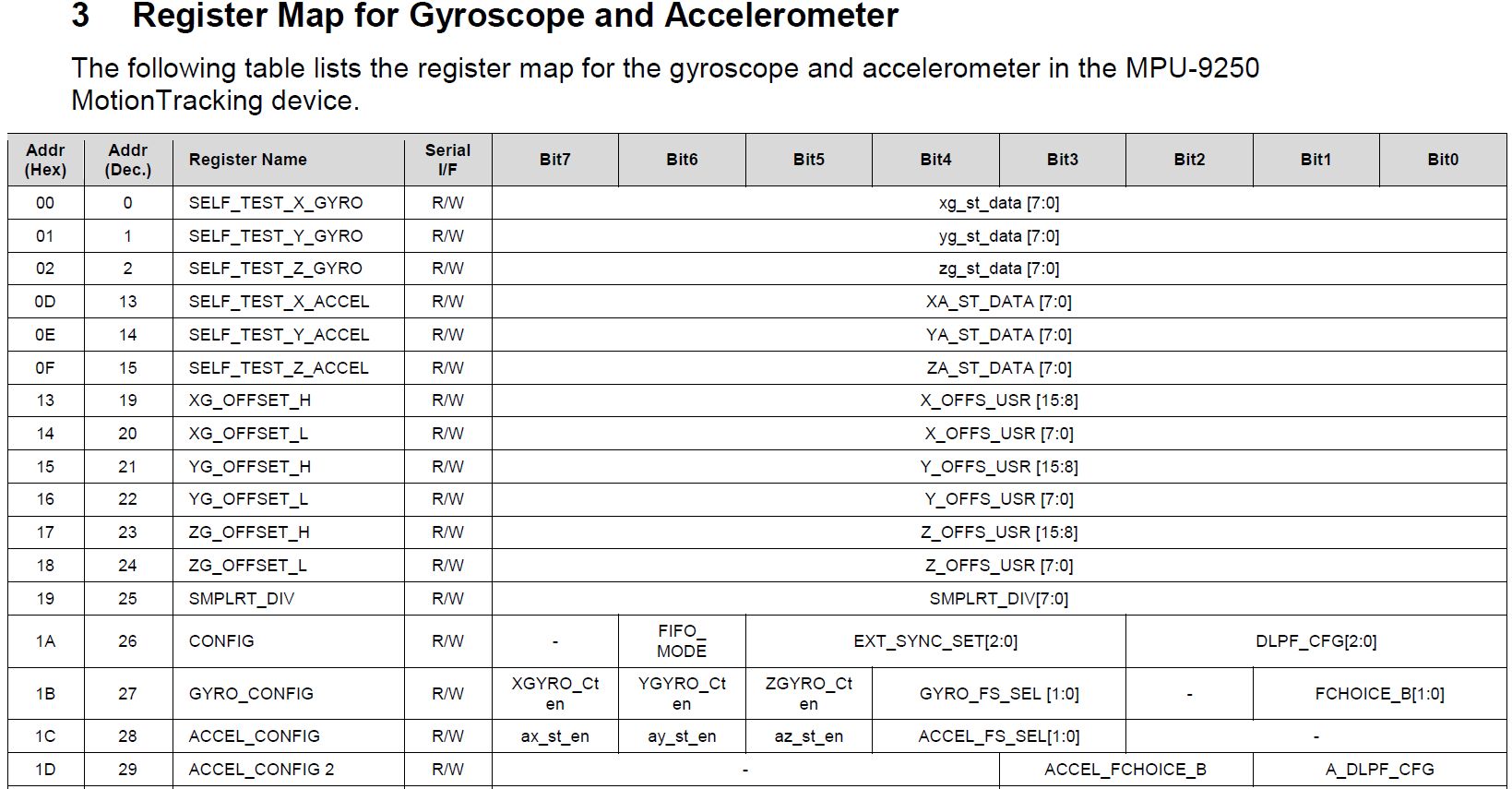
Опуская технические подробности конфигурирования, можно сказать следующее. В данном датчике осуществляется настраиваемая фильтрация показаний не только акселерометров, гироскопов, но и температурного датчика. Для каждого существует в общей сложности от 7 до 10 режимов, характеризующихся такими понятиями, как полоса пропускания (Bandwidth) в Гц, задержка в мс, частота дискретизации (sampling frequency, Fs) в кГц.

Легче не стало, так что пройдёмся прямо по списку.
Наследие Древнего Рима
С частотой дискретизации (она же частота семплирования) всё понятно — это количество взятых за секунду точек непрерывного по времени сигнала при его дискретизации АЦП. Измеряется в герцах.
Для того, чтобы в выборку попало значение, приближенное к пиковой амплитуде сигнала, важно брать частоту дискретизации минимум в 10 раз больше частоты полезного сигнала. MPU-9250 предлагает три варианта Fs = 32kHz, 8kHz, 1kHz.
Но это абсолютно не значит, что сигнал на выходе акселерометра или гироскопа появляется с тем же периодом.
Если взять те же дроны, тут всё упирается в борьбу за снижение энергопотребления, повышение скорости вычислений и снижение шума выходных данных. Можно понизить частоту обновления данных на выходе, позволив внутренним алгоритмам интегрировать входную информацию в течение некоторого периода времени. Среднеквадратичный понизится, но также сузится и полоса пропускания (датчик сможет засечь лишь те процессы, частота которых будет меньше 50% скорости обновления данных).
Тут лучше сразу вспомнить теорему Котельникова. Она обещает, что при дискретизации аналогового сигнала можно избежать потерь информации (то есть восстановить сигнал без искажений), если частота полезного сигнала будет не больше половины частоты дискретизации, называемой также частотой Найквиста. На практике классический антиалайзинговый фильтр (фильтр низких частот, уменьшающий вклад побочных частотных компонентов в выходном сигнале до пренебрежимо малых уровней — ГОСТ Р 8.714-2010) требует в большинстве случаев разницу минимум в 2.5 раза [Siemens].
Для Fs = 32kHz частота Найквиста будет 16kHz. При этом полезный сигнал вряд ли выйдет за полосу fa = 20Hz (мало кто может менять направление движения чаще 20 раз в секунду). Итого, частота дискретизации значительно превышает частоту, требуемую для сохранения информации, содержащейся в полосе fa (40Hz, в 400 раз превышает), то есть полезный сигнал избыточно дискретизирован. Полоса между частотами fa и fs-fa не содержит никакой полезной информации. Можно уменьшить частоту дискретизации (на диаграмме это сделано с коэффициентом М, [7]), проредив последовательность семплов (отсчётов). Этот процесс и называется децимацией.
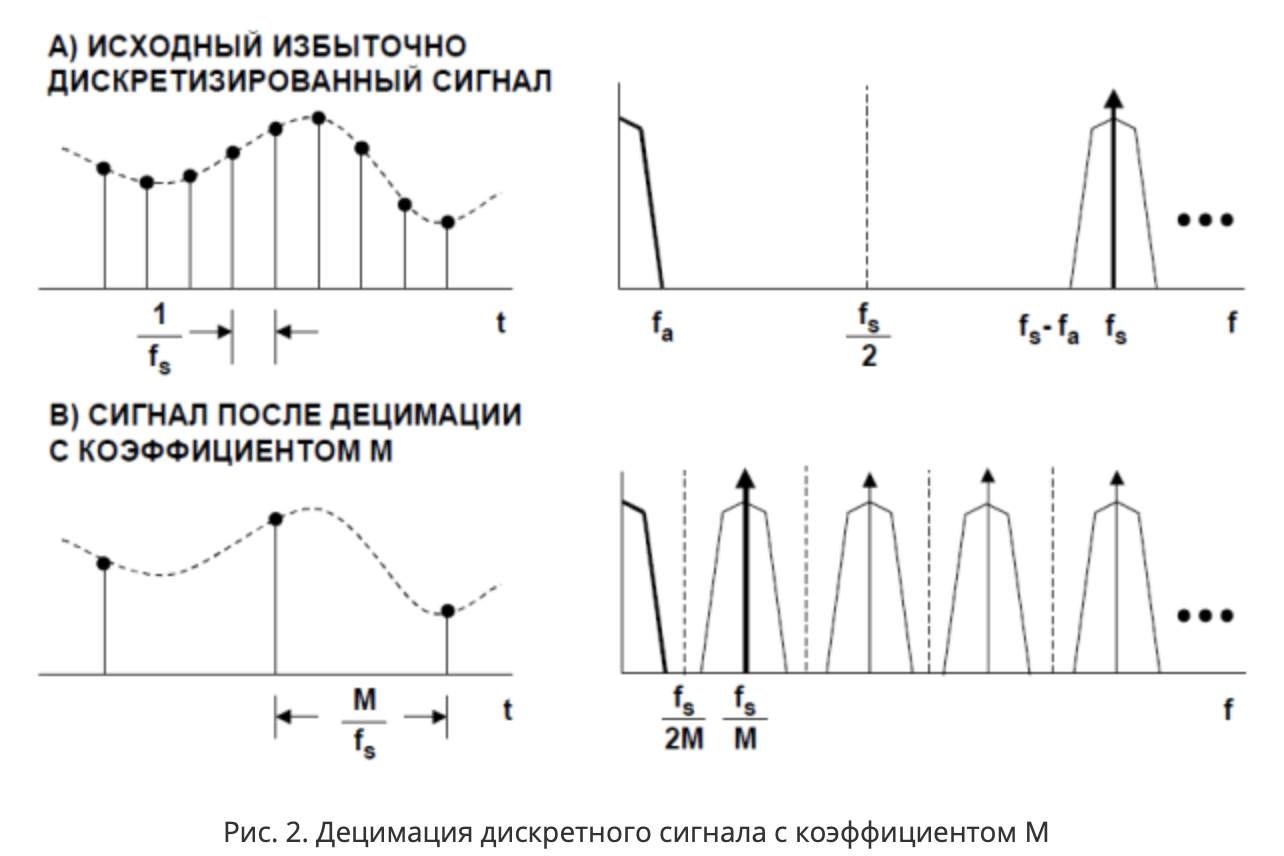
Зачем объединять фильтр низких частот и децимацию?
Честная выдержка из Вики:
Если исходный сигнал не содержит частот, превышающих частоту Найквиста децимированного сигнала, то форма спектра полученного (децимированного) сигнала совпадает с низкочастотной частью спектра исходного сигнала. Частота дискретизации, соответствующая новой последовательности отсчётов, в N раз ниже, чем частота дискретизации исходного сигнала.
Если исходный сигнал содержит частоты, превышающие частоту Найквиста децимированного сигнала, то при децимации будет иметь место алиасинг (наложение спектров).
Таким образом, для сохранения спектра необходимо до децимации удалить из исходного сигнала частоты, превышающие частоту Найквиста децимированного сигнала. В спецификации на MPU-9250 не очень много информации о характеристиках DLPF, но можно найти исследования энтузиастов [9].
Bandwidth, она же frequency response (частотный отклик)
диапазон частот, в котором датчик обнаруживает движение и выдает действительный выходной сигнал. В некоторых спецификациях приводится частотная характеристика датчика — зависимость электрического выходного сигнала акселерометра от внешних механических воздействий с фиксированной амплитудой, но различными частотами. В пределах полосы пропускания неравномерность частотной характеристики не превышает заданной. В случае применения цифрового фильтра низких частот выбор полосы пропускания как раз позволяет изменять частоту среза, неизбежно оказывая влияние на скорость отклика датчика на изменения положения в пространстве. Частота среза обязана быть меньше половины скорости оцифровки (digital output data rate, ODR), называемой также частотой Найквиста.
.
Итог: сигналы, прошедшие через ФНЧ, менее зашумлены, у них лучшее разрешение, но при этом меньшая полоса пропускания. Поэтому указание разрешения в спецификации без привязки к полосе пропускания смысла не имеет.
Вернёмся к разрешению
В спецификации на MPU-9250 сведений о разрешении в принципе нет, для BMI088 под именем «Разрешение» представлены цифровое разрешение (LSB) и чувствительность»:
$$display$$N_
А шумовая полоса пропускания связана с 3dB полосой коэффициентами, соответствующим порядку низкочастотного фильтра:
$$display$$ENBW = 1.57\cdot f_ <3dB>\textrm< для 1-го порядка>$$display$$
$$display$$ENBW = 1.11\cdot f_ <3dB>\textrm< для 2-го порядка>$$display$$
$$display$$ENBW = 1.025\cdot f_<3dB>\textrm< для 4-го порядка>$$display$$
Delay (ms), или откуда берётся задержка
Из необходимости сохранять во внутреннем буфере переменные для деления фильтром сигнала на разные частоты
Итого. Чем ниже частота обрезания фильтра, тем меньше шума в сигнале. Но тут надо быть осторожным, потому что одновременно с этим вырастает и задержка. Кроме того, можно пропустить полезный сигнал [8].



