Принцип работы инкрементального энкодера
Содержание:
Инкрементальные энкодеры, в отличие от абсолютных, выдают информацию о положении относительно положения в предыдущий момент времени. После включения питания вся информация о предыдущих перемещениях пропадает и положение вала становится неопределённым. Как правило в таком случае механизм приходится перемещать в некоторое известное положение для того чтобы информация о положении снова стала актуальной.
Применяемые технологии
Работа современных энкодеров базируется на использовании определенных физических принципов, основными из которых являются магнитный, ёмкостной и оптический. Для определения положения объекта ёмкостной принцип предполагает использование изменений электрического поля, магнитный – изменений магнитного поля, оптический – изменений пучков света.

Оптические
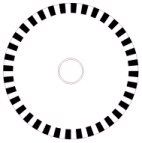
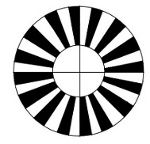
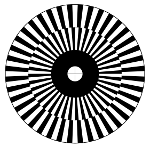
Оптические датчики угла поворота используют изменения световых пучков, происходящие во время кругового движения кодового диска, с которым взаимодействуют пучки света. Работа оптических энкодеров основана на двух схемах: пропускательной и отражательной.
В случае пропускательной схемы световые пучки попадают на фотоприемники после прохождения через узкие отверстия в кодовом диске.
При отражательной схеме на кодовом диске происходит чередование зеркальных и рассеивающих участков. Отражающийся от зеркальных участков свет, попадает в приёмник оптического излучения.
Кодовый диск инкрементного энкодера (слева) и абсолютного энкодера (справа)
Магнитные
Магнитные энкодеры для работы используют изменения магнитного поля, которые происходят во время кругового движения кодового диска. В зависимости от способа измерения изменений, магнитные датчики углов поворота делятся на следующие виды:
Ёмкостные
Принцип действия базируется на оценке изменений электрического поля, которые происходят при круговом движении кодового диска специальной конфигурации. Изменения емкости конденсатора, образованные вращающимся кодовым диском и обкладками на неподвижной части энкодера, является основанием для оценки электрического поля.
Выходной сигнал
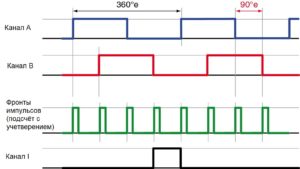
В ряде случаев энкодер оснащается третьим каналом – индексным (обозначают I или Z). Импульс на нём появляется один раз за полный оборот энкодера. Этот импульс позволяет контролировать показания с каналов A и B, а также облегчает привязку показаний инкрементального энкодера к реальному положению механизма.
Основные параметры
Разрешение
Разрешение инкрементального энкодера определяет какое минимальное перемещение вала датчика приводит к изменению сигнала на выходе датчика. У всех инкрементальных энкодеров разрешение приводится в полных циклах на один оборот. Под одним полным циклом подразумевается полный цикл измерения сигналов на двух основных каналах энкодера (A и B). При обработке сигнала инкрементального энкодера часто пользуются подсчётом импульсов «с учетверением». В этом случае подсчитывается каждый фронт (передний и задний) по обоим основным каналам энкодера A и B. Легко видеть что за время полного цикла таких фронтов будет 4 – 2 по каналу A и 2 по каналу B. Таким образом при такой обработке количество отсчётов на один оборот энкодера будет в 4 раза больше чем разрешение указанное в полных циклах.
Интерфейс
Все инкрементальные энкодеры имеют интерфейс в виде двух импульсных сигналов, а некоторые имеют и дополнительный индексный канал. Отличия могут заключаться в напряжении импульсных сигналов и в наличии дифференциального выхода (драйвера линии).
Импульсный сигнал формируемый на выходе инкрементального энкодера принимает 2 значения – максимальное и минимальное. Минимальное значение в большинстве случаев соответствует нулю. Максимальное значение может быть или фиксированным (напр. 3,3 В, 5 В) так и зависеть от напряжения питания поданного на энкодер (например на 1В или на 2 В меньше напряжения питания).
По способу формирования выходного сигнала можно выделить энкодеры:
В случае несимметричного выхода сигналы всех трёх импульсных каналов формируются относительно общей точки источника питания (0 источника питания). Такой сигнал достаточно прост при использовании и экономичен с точки зрения числа подключаемых проводов, однако уязвим для электромагнитных помех в случае передачи по проводам значительной длины. Сигнал энкодеров с дифференциальным выходом лишён этого недостатка. Для каждого канала при помощи специального формирователя вместо одного сигнала формируется пара сигналов – нормальный и логически инверсный, а соответствующий приёмник принимает сигнал по разности этой пары сигналов. Это позволяет устойчиво передавать сигнал по длинным проводам (десятки и сотни метров) даже при наличии помех.
Скорость вращения
Важным параметром о котором не следует забывать является максимальная скорость вращения при которой происходит корректная выдача выходного сигнала. Именно от него зависит можно ли будет установить инкрементальный энкодер на валу скоростных бесколлекторных двигателей или же его можно будет использовать только на выходе мотор-редукторов и сравнительно медленных моментных двигателей.
Когда применяют инкрементальные энкодеры
Вопрос о том какие энкодеры предпочтительней применить в той или иной системе неразрывно связан с требованиями, предъявляемыми к ней. Если сразу после подачи питания на систему датчик должен выдавать правильное положение, то тогда лучше применить абсолютный энкодер. А если после старта допускается период подготовки системы к работе когда можно провести вывод механизма в нулевое положение, то тогда можно применять инкрементальный энкодер.
Инкрементные энкодеры имеют более простую конструкцию, поэтому среди них можно найти модели очень компактных размеров, недостижимых для абсолютных датчиков. Этим определяется применение инкрементных энкодеров в малогабаритных системах.
Если энкодер используется только для определения скорости вращения механизма, то для выполнения этой функции достаточно инкрементного энкодера.
Области применения
Инкрементальные энкодеры являются одним из самых распространённых датчиков в современных сложных технических системах. Вот лишь некоторые примеры:
Инкрементальные энкодеры


Инкрементальные энкодеры: принцип работы
Инкрементальные энкодеры применяются на серводвигателях в качестве устройства обратной связи для определения положения и направления вращения вала. Кроме того контроллеры двигателей могут использовать данные от энкодеров для расчета скорости и ее контроля. Инкрементальный энкодер является критическим компонентом, который передает важные данные необходимые для автоматического управления различными системами движения от автономных транспортных средств до торговых автоматов.
Двухканальный инкрементальный энкодер на выходе имеет два сигнала, которые обычно обозначаются как канал А и канал В. Данные сигналы называются квадратурными, потому что между ними существует смещение фазы в 90 градусов (см. рис.1)
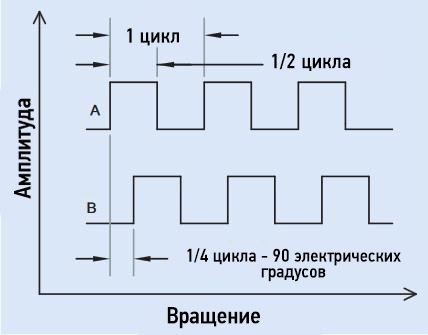
Рис.1
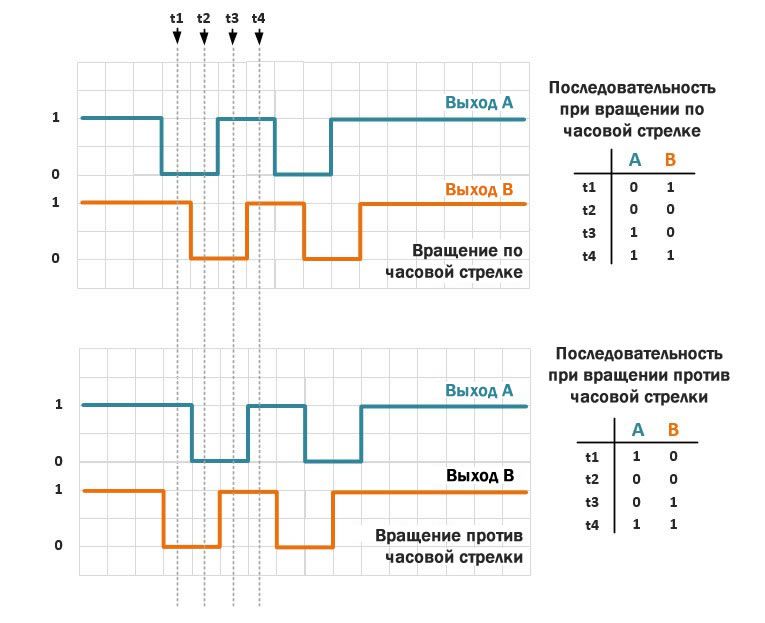
Разработчики могут использовать эту разницу фаз для определения направления вращения. В случае вращения в одном направлении сигнал в канале А изменяется от низкого уровня к высокому раньше чем в канале В, то есть канал А ведет канал В. При вращении в противоположном направлении канал В ведет канал А. Направление вращения серводвигателя определяется при помощи датчиков установленных на валу двигателя (см. рис.2 ниже).
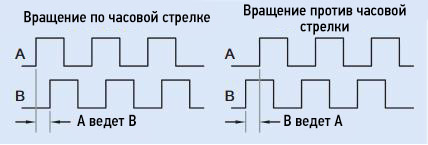
Рис. 2 Использование сигналов каналов А и В для определения вращения
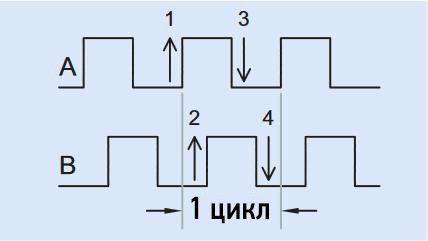
Рис. 3
Трехканальный инкрементальный энкодер состоит из каналов А и В, и дополнительного опорного канала, обозначаемого как индекс. Индексный канал генерирует один отсчет на оборот при прохождении вала определенного положения. Импульс индексного канала может быть стробированным или не стробированным. Фронты не стробированного импульса индексного канала не совпадают с фронтами импульсов в каналах А и В. Фронты стробированного импульса индексного канала будут совпадать с высоким или низким уровнем в одном или обоих каналах А и В. Обычно используют стробированный канал индекс, который совпадает с сигналом в каналах А и В. См. рис.4
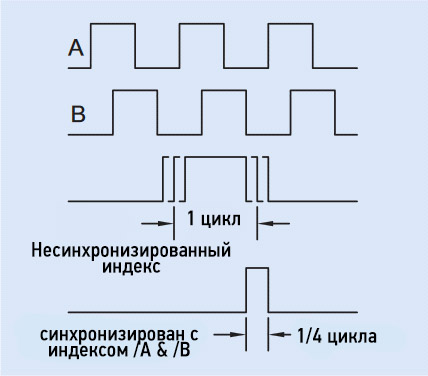
Рис. 4. Временная диаграмма трехканального инкрементального энкодера с сравнением синхронизированного и не синхронизированного импульса в индексном канале.
Индексный сигнал обычно используется для определения центрального положения, исходного положения точки обнуления или нулевой отметки. Он часто используется в сочетании с некоторым типом датчика приближения, который обеспечивает определение приближения к начальному положению. Все три выхода энкодера: А, В и индекс могут быть как с несимметричными, так и с симметричными выходами. Несимметричный выход сравнивается с сигналом земля (GND) источника питания энкодера. Подобный энкодер требует только одного провода для каждого канала плюс два провода к источнику питания (показаны на рис. 5). Несимметричные выходы энкодера, как правило, TTL совместимы, для их подключения желательно использовать как можно более короткие проводники, чтобы минимизировать ухудшение сигнала и проблемы с электрическими помехами. Энкодер с одним несимметричным выходом может быть экономичным решением для ОЕМ производителей.
Выходы дифференциальной линии драйвера более невосприимчивы к электрическим помехам, чем сигналы несимметричных линий, потому дифференциальные линии могут быть большей длины. Эти выходы являются комплементарными сигнальными парами, когда сигнал имеет высокий уровень, а другой низкий, как это показано на рисунке 6. Каждый дифференциальный выход требует двух проводов; обычно используют витые пары для увеличения помехоустойчивости. Драйверы дифференциальной линии имеют низкий импеданс, что делает устойчивыми к помехам. Они должны быть подключены к высокоимпедансными дифференциальным приемникам для подавления синфазного шума. Комплементарные выходы обрабатываются приемниками дифференциальной линии, таким образом, чтобы требуемый сигнал мог быть восстановлен без шумов и искажений, как это показано на рис.7. Эти преимущества связаны с дополнительными затратами для схем дифференциальных драйверов линий и дополнительных сигнальных линий.
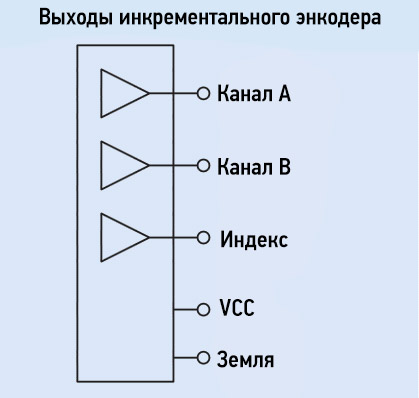
Рис. 5. Схема подключения трехканального энкодера с несимметричным выходом
Выходы дайвера дифференциальных линий, как правило, более устойчивы в отношении электрических помех в сравнении с однопроводными линиями. Эти выходы являются комплементарными, потому, когда сигнал в одной линии высокого уровня, в другой линии он низкого уровня, как это показано на рис.6. Каждая дифференциальная пара состоит из двух проводов; обычно витые пары используются для повышения помехоустойчивости сигнальных линий. Дифференциальные линейные драйверы имеют низкий импеданс, что делает устойчивыми к помехам. Они должны быть подключены к высокоимпедансными дифференциальным приемникам для подавления синфазного шума. Комплементарные выходы обрабатываются приемником дифференциальной линии таким образом, чтобы необходимый сигнал мог быть восстановлен без шумов и искажений, как это показано на рис. 7. Такие преимущества увеличивают цену решения, в связи с высокой стоимостью дифференциальных линейных драйверов и дополнительных сигнальных линий.
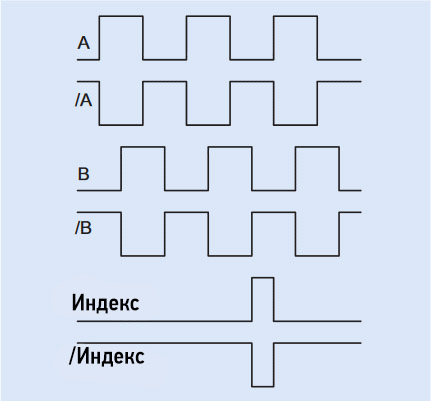
Рис.6. Временная диаграмма драйвера дифференциальной линии энкодера
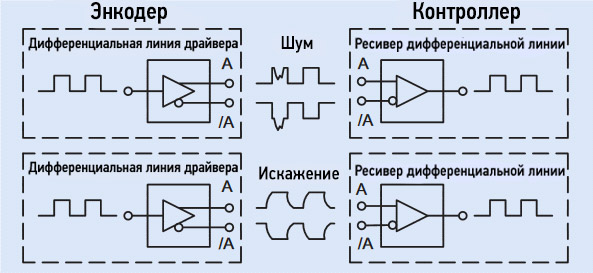
Рис. 7. Обработка дифференциального сигнала линейным драйвером
Инкрементальный энкодер: что это такое, принцип работы, виды, для чего используется
Энкодер можно отнести к достаточно новым техническим устройствам, которые были бы невозможны без появления робототехнической области науки. Данная разновидность устройств необходима в целях изменения и контроля углов поворотов валов на электродвигателях. Они также используются с целью изменения движения в тех или иных элементах роботов.

Разновидности
Абсолютная модель выдает уникальные цифровые коды относительно отдельно взятого расположения вала, потому становится возможным определять углы поворота даже после того, как было отключено электропитание.
Энкодеры инкрементального вида выдают импульсный цифровой код для каждого отдельно взятого положения вала электромотора. Такие устройства позволяют определять, с какой скоростью вращается вал во время отключения электропитания в том случае, когда нет необходимости сохранять информацию об абсолютном угловом положении.
Иначе говоря, в то время, когда вал не движется, импульс не поступает. Следовательно, когда он снова приходит в движение, датчики будут вести отсчеты его угловых параметров с исходной позиции.
Инкрементальный энкодер

Импульсные (они же пошаговые) энкодеры относят к той разновидности энкодирующих устройств, что предназначены с целью указания направлений углового перемещения всевозможных внешних механизмов. Пошаговые энкодеры формируют импульсы, число которых соответствует числу поворота вала на определенные углы. Они связаны со счетными приборами – это требуется для того, чтобы можно было считать импульсы и преобразовывать их в измерения перемещения вала.
Конструктивные особенности
Конструктивной особенностью данной разновидности можно считать наличие следующих элементов:
Метки, нанесенные на диск, распределяются определенным образом – их число будет определяться числом импульсов, осуществленных в рамках одного оборота. К примеру, если диск разделяется на 1000 меток, то в продолжение 250 импульсов вал будет повернут под прямым углом.
Применяемые технологии – магнитная и оптическая
Сегодня энкодеры работают, как правило, на основании двух технологий – оптической и магнитной.
Так, в приспособлениях оптического типа в качестве первичных датчиков сигналов выступают оптические диски, описанные выше. Число зачерненных и прозрачных отметок, расположенных на диске, будет определять и степень разрешения.
Но в последнее время популярность начинают приобретать энкодеры магнитного типа. В них сигналы положения вала двигателя формируются специальным датчиком. При этом открываются новые технологические возможности, к примеру, программируемое число импульсов за один оборот.
Квадратура выхода
В качестве так называемой квадратуры выхода в данном виде энкодирующих устройств применяется пара выходных каналов. Они позволяют определять, в каком именно направлении происходит вращение вала.
При этом энкодеры, оборудованные всего одним выходом (на схеме обозначается литерой А), носят название тахометров.
Максимальная частота ответа
В качестве максимальной частоты ответа выступают частоты, при которых работающий энкодер дает электрические ответы. Максимальные частоты определяют число импульсов на выходе, на которые он отзывается в течение одной секунды.
Таким образом, пошаговые энкодеры должны удовлетворять следующему отношению:
(rpm / 60)x(разрешение) меньше или равно максимальной частоте ответа.
Разрешение
Под разрешением подразумевают число выходных импульсов при каждом вращении вала.
Соединительный вал
Чтобы вал датчика был соединен механическим способом, нужно применять специальные гибкие соединители – эластичные муфты. Они предназначены для того, чтобы компенсировать возможное биение вала в любых направлениях.
Благодаря этому, снижается степень преждевременного выхода из строя валового механизма датчика. Даже минимальные люфты могут вывести энкодер из строя.
Виды пошаговых энкодеров и их особенности
Кроме предложенной выше классификации, инкрементальные энкодирующие устройства можно поделить согласно типу информации для считывания.
Одиночные нужны для простого подсчета числа импульсов.
Квадратурные, они же двойные, энкодеры позволяют считывать не только число поступаемых импульсов, но и направление движения.
Энкодирующие устройства, построенные на двоичном коде, позволяют определять точное положение устройства в тот или иной момент.

Энкодирующие устройства, основанные на так называемом коде Грэя, дают возможность определять положение в данный момент.

Некоторые особенности подключения
При подключении и отладке энкодеров необходимо строго придерживаться рекомендаций, данных производителем.
Для начала нужно собрать исходную схему, согласно инструкции от производителя, и подключиться к выводам А и В с помощью осциллографа. Далее необходимо подкрутить подключаемый энкодер сначала по часовой стрелке, а затем – в противоположном направлении. При изменении направления вращения будет изменяться и последовательность замыкания контактных пластин.
Поскольку в энкодерах работают контакты механического типа, то всегда есть риск возникновения так называемого дребезга. Это приводит к тому, что контакт может замыкаться и размыкаться самопроизвольно – из-за естественной упругости материала.
Чтобы избежать дребезга, можно пойти двумя путями. Например, добавить еще несколько конденсаторных или резисторных элементов. Дребезги в этом случае можно довольно легко погасить. При этом осциллограф покажет крутые фронты и отсутствие дребезга.
А вот второй метод является программным. Это потребует от исполнителя знаний программирования. Зато можно будет отслеживать состояние энкодирующего устройства при помощи внешнего прерывания. В этом случае необходимо организовать задержки в течение 2-3 десятков миллисекунд после каждого срабатывания прерывания. В это время энкодер перестанет фиксировать изменения состояний вывода, следовательно, перестанет быть чувствительным к дребезгам.
Используется несколько методов обработки данных, поступающих с прибора. Например, одна из его ножек подключается к выходу для внешнего прерывания и настраивается на прерывание по спадающим фронтам. При этом проверяется положение второй ножки. В том случае, если на ней фиксируется нулевое состояние, движение вала осуществляется в одном направлении. При этом светодиоды загораются или гаснут в зависимости от направления вращения.
Согласно второму методу, нужно сравнить настоящее положение с предыдущим. Например, предыдущее состояние энкодера равнялось трем. Если последующее положение равняется одному, то вращение осуществляется в одном направлении. Если же оно равно двум, соответственно, в другом. Таким образом, можно будет осуществлять фиксацию перехода из одного положения устройства в другое, и устанавливать направление движения вращения.
Крепление устройства с вращающимися объектами осуществляется через нормальные или полые валы. При этом полый вал может быть выполнен как в сквозном, так и в несквозном варианте. Здесь все зависит от конкретных конструктивных особенностей устройства и преследуемых целей.
Валы энкодера и вращающихся объектов соединяются также с помощью гибких или жестких соединительных муфт. Как альтернативный вариант крепления, нередко используют монтаж прямо на вал самого объекта. Это возможно, если аппарат оснащен полым валом. Чтобы не допустить возможного возникновения несоосности и биений, можно зафиксировать его через штифты. Если же речь идет о неполом вале, то биение может быть скомпенсировано через гибкую деформацию втулки.
Чем привлекательны данные виды энкодеров
Энкодирующие устройства неспроста получили столь обширное распространение при конструировании большого спектра устройств. Они довольно дешевы и просты в монтаже.
Чтобы выбрать верный вариант для успешного внедрения в те или иные управленческие схемы, потребуется определиться:
Где применяются инкрементальные энкодеры
Устройства предлагаются в разных моделях и вариантах исполнения. Следует внимательно подходить к выбору энкодеров. К примеру, если он работает на благо пищепрома, то следует использовать только те разновидности, которые соответствуют нормам гигиены. Как правило, они выполнены из нержавеющих материалов.
В области печатного и текстильного производства датчики обычно дополняют аппаратами для обрабатывания данных.
Инкрементные энкодеры устанавливаются на транспортерах, предназначенных для перемещения древесных заготовок.
Если требуется использовать энкодер при металлообработке, то прибор следует оснастить специализированной защитой от вибрационных воздействий, а также от повышенных температур и попадания внутрь механизма частичек влаги и пыли. На электрические моторы устанавливаются особые виды энкодеров, способных замерять скорости оборотов шпинделя, положение оси и ее продвижение.
Если речь идет о системе автоматизации на производствах, то используются мини-энкодеры диаметром не более 2,5 см и имеющие различные диапазоны напряжений на выходах.
Лифтовые устройства работают на приспособлениях диаметром 4,4 см. Часто их монтируют прямо на лебедках для того, чтобы снизить воздействие на них механического характера.
В медицинском оборудовании датчики-энкодеры применяются в ЭМРТ. Они предназначены для исключения воздействия магнитного поля. Корпус в этом случае изготавливают из непроводящего материала.
В телекоммуникационной сфере энкодеры используются для определения расположения и направленности антенны. Иногда нужно применять датчики для работы в жестких условиях.
Находят свое применение энкодирующие аппараты и в области альтернативной энергетики. К примеру, они устанавливаются на программируемых датчиках, используемых в солнечной ферме. Датчики изготавливаются из специализированных материалов, которые надежно защищены от попадания влаги и ультрафиолета.
Крайне распространены сегодня электромеханические энкодеры, преобразующие вращательные движения в аналоговые или цифровые форматы распространения информации. Они довольно схожи с потенциометрами, однако могут постоянно осуществлять вращение как в направлении часовой стрелки, так и в обратную сторону.
Поворотные энкодеры различаются по нескольким типам. Как уже отмечалось, это абсолютные и инкрементальные – они же относительные. Первому типу выдают значения, которые пропорциональны настоящему углу расположения вала. Второй тип выдает как шаг передвижения валов, так и их направленность. Благодаря этому, именно энкодирующее оборудование поворотного типа получает все большее распространение в различных сферах бытовой электротехники. Главным образом, это конструирование всевозможных управляющих ручек. Часто такие устройства могут заменить потенциометр или кнопки для осуществления навигации.
Если необходимо выполнить быструю навигацию и настройку, либо оперативное введение данных и выбора пунктов меню, то энкодеры также придут на помощь.
Определенные модели имеют специальные кнопки, создающие дополнительные входы для процессоров, которые могут применяться как другие пользовательские команды в организации управленческого интерфейса.
— персональную информацию, которую Пользователь сознательно раскрыл Администрации Сайта в целях пользования ресурсами Сайта;
— техническую информацию, автоматически собираемую программным обеспечением Сайта во время его посещения.



