 На шильдике (информационной табличке) любого асинхронного двигателя, кроме других рабочих параметров, указан такой его параметр как косинус фи — Cosфи. Косинус фи иначе называется коэффициентом мощности асинхронного двигателя.
На шильдике (информационной табличке) любого асинхронного двигателя, кроме других рабочих параметров, указан такой его параметр как косинус фи — Cosфи. Косинус фи иначе называется коэффициентом мощности асинхронного двигателя.
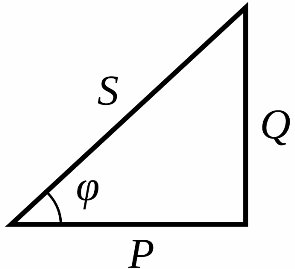
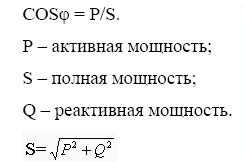
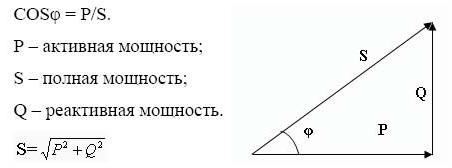
Почему этот параметр называется косинусом фи, и какое отношение он имеет к мощности? Все довольно просто: фи — это разность фаз между током и напряжением, и если изобразить графически активную, реактивную и полную мощности, имеющие место при работе асинхронного двигателя (трансформатора, индукционной печи и т. д.), то окажется, что отношение активной мощности к полной мощности — это и есть косинус фи — Cosфи, или другими словами — коэффициент мощности.
При номинальном напряжении питания и при номинальной нагрузке на валу асинхронного двигателя, косинус фи или коэффициент мощности как раз и будет равен тому значению, которое указано на его шильдике.

Например, для двигателя АИР71А2У2 коэффициент мощности будет равен 0,8 при нагрузке на валу 0,75 кВт. Но КПД этого двигателя равен 79%, следовательно потребляемая двигателем активная мощность при номинальной нагрузке на валу окажется больше 0,75 кВт, а именно 0,75/КПД = 0,75/0,79 = 0,95 кВт.
Тем не менее, при номинальной нагрузке на валу, параметр коэффициент мощности или Cosфи связан именно с потребляемой из сети энергией. Значит полная мощность данного двигателя окажется равна S = 0,95/Cosфи = 1,187 (КВА). Где P = 0,95 – потребляемая двигателем активная мощность.
При этом коэффициент мощности или Cosфи связан с нагрузкой на валу двигателя, поскольку при разной механической мощности на валу — разной будет и активная составляющая тока статора. Так, в режиме холостого хода, то есть когда к валу ничего не присоединено, коэффициент мощности двигателя не превысит, как правило, значения 0,2.
Если же нагрузку на валу начать увеличивать, то активная составляющая тока статора также будет расти, следовательно коэффициент мощности возрастет, и при близкой к номиналу нагрузке окажется равным примерно 0,8 — 0,9.
Если теперь нагрузку продолжить увеличивать, то есть нагружать вал сверх номинала, то ротор будет тормозиться, возрастет величина скольжения s, индуктивное сопротивление ротора станет вносить свой вклад, и коэффициент мощности начнет уменьшаться.
Если двигатель определенную часть рабочего времени работает вхолостую, то можно прибегнуть к снижению подводимого напряжения, например переключением с треугольника на звезду, тогда фазное напряжение на обмотках уменьшится в корень из 3 раз, снизится индуктивная составляющая от крутящегося вхолостую ротора, а активная составляющая в обмотках статора немного возрастет. Коэффициент мощности таким образом немного повысится.

Вообще, системы, питающиеся переменным током, такие как асинхронные двигатели, всегда обладают кроме активной еще и индуктивной и емкостной составляющими, поэтому каждые пол периода в сеть возвращается какая-то определенная часть энергии, называемая реактивной мощностью Q.
Этот факт вызывает у поставщиков электроэнергии проблемы: генератор вынужден поставлять в сеть полную мощность S, которая к генератору возвращается, но провода то все равно требуются соответствующего сечения под эту полную мощность, и, конечно, возникает паразитный нагрев проводов от циркулирующего туда-сюда реактивного тока. Получается, что генератор обязан поставлять полную мощность, часть которой в принципе является бесполезной.
В чисто активной форме генератор электростанции мог бы поставить потребителю гораздо больше электроэнергии, а для этого необходимо, чтобы коэффициент мощности был бы близок к единице, то есть как при чисто активной нагрузке, у которой Cosфи = 1.
Для обеспечения таких условий некоторые крупные предприятия устанавливают у себя на территории установки компенсации реактивной мощности, то есть системы из катушек и конденсаторов, которые автоматически подключаются параллельно асинхронным двигателям когда коэффициент их мощности снижается.
Получается, что реактивная энергия циркулирует между асинхронным двигателем и данной установкой, а не между асинхронным двигателем и генератором на электростанции. Так коэффициент мощности асинхронных двигателей доводят почти до 1.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Коэффициент мощности cos φ: определение, назначение, физический смысл
 Коэффициент мощности – это скалярная физическая величина, показывающая насколько рационально потребителями расходуется электрическая энергия. Другими словами, коэффициент мощности описывает электроприемники с точки зрения присутствия в потребляемом токе реактивной составляющей.
Коэффициент мощности – это скалярная физическая величина, показывающая насколько рационально потребителями расходуется электрическая энергия. Другими словами, коэффициент мощности описывает электроприемники с точки зрения присутствия в потребляемом токе реактивной составляющей.
В этой статье мы рассмотрим физическую сущность и основные методы определения cos φ.
Математически cos φ
Математически cos φ определяется как отношение активной мощности к полной или равен отношению косинуса этих величин (отсюда и название параметра).
Величина коэффициента мощности может изменяться в интервале 0 — 1 (либо в диапазоне 0 — 100%). Чем ближе его величина к 1, тем лучше, поскольку при величине cos φ = 1 – потребителем реактивная мощность не потребляется (равняется 0), следовательно, меньше потребляемая полная мощность в общем.
Низкий cos φ указывает на то, что на внутреннем сопротивлении потребителя выделяется повышенная реактивная мощность.
Когда токи / напряжения являются идеальными сигналами синусоидальной формы, то коэффициент мощности составляет 1.

Геометрически коэффициент мощности можно изобразить, как косинус угла на векторной диаграмме между током, напряжением между током, напряжением. В связи с чем при синусоидальной форме токов и напряжений величина cos φ совпадает с косинусом угла, от которого отстают эти фазы.
Короткое видео о кратким объяснением, что такое коэффициент мощности:
Повышение коэффициента мощности
Значение коэффициента мощности рассчитывают при проектировании сетей. Поскольку низкое его значение является следствием увеличения величины общих потерь электроэнергии. Для его увеличения в сетях используют различные способы коррекции, повышая его значение до 1.
Повышение cos φ преследует 3 основные задачи:
Технически коррекция реализуется в виде введения различных дополнительных схем на вход устройств. Эта техника требуется для равномерного использования мощности фазы, устранения перегрузок нулевого провода 3-х-фазной сети, и является обязательной для импульсных источников питания, установленной мощностью 100 Вт и более.


Основные способы коррекции cos φ
1. Коррекция реактивной составляющей мощности производится путём включения реактивного элемента, имеющего противоположное действие. К примеру, для компенсации работы асинхронной машины, обладающей высокой индуктивной реактивной составляющей мощности, в параллель включается конденсатор.
2. Корректировка нелинейности электропотребления. При потреблении тока нагрузкой непропорционально основной гармонике напряжения, для повышения коэффициента мощности в схему вводят пассивный (активный) корректор коэффициента мощности. Наиболее простым примером пассивного корректора cos φ является дроссель с высокой индуктивностью, подключаемый последовательно с нагрузкой. Дроссель производит сглаживание импульсного потребления нагрузки и создание низшей, основной гармоники тока.
3. Корректировка естественным способом, не предусматривающая установку дополнительных устройств, предполагает упорядочение технологического процесса, рациональное распределение нагрузок, ведущее к улучшению режима потребления электроэнергии оборудованием, повышению коэффициента мощности.
Подробное видео с объяснением, что такое cosφ :
Коэффициент мощности и гармоники в электросети

Контроллер компенсаторной установки для увеличения cos φ
В прошлой статье я рассказал при исследование качества электроэнергии при помощи анализатора HIOKI. Там я обещал продолжить рассказ и поделиться своими знаниями по таким понятиям, как коэффициент мощности (известный в народе как cos φ) и гармоники питающего напряжения.
Кроме того, расскажу, что такое PF, DPF, и докажу, что косинус и синус – две большие разницы! 🙂
Для примера разберём, как обстоят дела с косинусом и гармониками на предприятии, которое мы обследовали совместно с “ИК Энергопартнер”.
Косинус угла в электротехнике
Кто хочет, почитайте про cos φ в Википедии, а я расскажу своими словами.
Итак, что такое косинус в электротехнике? Дело в том, что есть такое явление, как сдвиг фаз между током и напряжением. Он происходит по разным причинам, и иногда важно знать о его величине. Сдвиг фаз можно измерить в градусах, от 0 до 360.
На практике степень реактивности (без указания индуктивного либо емкостного характера) выражают не в градусах, а в функции косинуса, и называют коэффициентом мощности:
Полная мощность является геометрической суммой активной Р и реактивной Q мощностей, поэтому формулу коэффициента мощности можно записать в следующем виде:
Формула коэффициента мощности через активную и реактивную мощности
На самом деле, всё не так просто, подробности ниже.
Легендарный Алекс Жук очень толково рассказал, что такое реактивная мощность, и всё по этой теме:
В видео подробно и доступно изложена вся теория по теме.
Размерности. Что в чём измеряется
Активная мощность Р ⇒ Вт (то, что измеряет домашний счетчик),
Реактивная мощность Q ⇒ ВАР (Вольт · Ампер Реактивный),
Полная мощность S ⇒ ВА (Вольт · Ампер).
Кстати, в стабилизаторах и генераторах мощность указана в ВА. Так больше. Маркетологи знают лучше.
Также маркетологи знают, что на потребителях (например, на двигателях) мощность лучше указывать в Вт. Так меньше.
Минусы и плюсы наличия реактивной составляющей
При питании нагрузки, имеющей только активный характер, сдвиг фаз между током и напряжений равен нулю. Этот случай можно назвать идеальным, при нем можно питающие сети используются полностью, поскольку нет потерь на бесполезную реактивную составляющую.
Реактивная составляющая не так бесполезна. Она формирует электромагнитное поле, нужное для адекватной работы реактивной нагрузки.
В реальной жизни нагрузка, как правило, имеет индуктивный характер (ток отстает от напряжения), и является активно-реактивной. Поэтому всегда, когда говорят о сдвиге фаз и о косинусе, имеют ввиду индуктивную нагрузку.
Основными источниками реактивной составляющей электроэнергии являются трансформаторы и асинхронные электродвигатели.
Чисто реактивная нагрузка бывает только в учебнике. Реально за счет потерь всегда присутствует и активная составляющая тоже.
Реактивная составляющая мощности питания является негативным фактором, поскольку:
По приведенным причинам необходимо понижать долю реактивной мощности в сети (повышать косинус) – это выгодно и энергоснабжающим организациям, и потребителям с распределенными сетями.
Пример: Для передачи определенной мощности нужен ток 100 А при cos φ = 1. Однако, при cos φ = 0,6 для обеспечения той же мощности нужно будет передать ток 166 А! Соответственно, нужно думать о повышении мощности питающей сети и увеличении сечения проводов…
Реактивная мощность – это часть мощности источника питания, эта мощность была накоплена в магнитном поле, а затем возвращена обратно источнику.
Как компенсируют реактивную составляющую мощности?
Для понижения (компенсации) индуктивного характера реактивной составляющей используют введение емкостной составляющей в нагрузку, которая имеет положительный сдвиг фаз напряжения и тока (ток опережает напряжение). Реализуется это путем подключения параллельно нагрузке конденсаторов необходимой емкости. В результате происходит компенсация, и нагрузка со стороны питающей сети становится активной, с малой долей реактивной составляющей.

Компенсаторная установка на контакторах
Важно, чтобы не происходило перекомпенсации. То есть, даже после компенсации косинус не должен быть выше 0,98 – 0,99, и характер мощности всё равно должен оставаться индуктивным. Ведь компенсация имеет ступенчатый характер (контакторами переключаются трехфазные конденсаторы).

Конденсатор компенсатора реактивной мощности
Однако, для конечного потребителя компенсация реактивной мощности не имеет особого смысла. Польза в её компенсации есть только там, где имеются длинные сети передачи, которые “забиваются” реактивной мощностью, что в итоге снижает их пропускную способность.
Поэтому компенсация реактивной мощности относится к вопросу энергосбережения – она позволяет экономить расход топлива на электростанциях, и выработку бесполезной реактивной энергии, которая в конечном счете преобразуется в тепловую энергию и выбрасывается в атмосферу.
На предприятиях учитывается и активная, и реактивная потребляемые мощности, и при составлении договора оговаривается минимальное значение коэффициента мощности, которое нужно обеспечить. Если косинус упал – включается повышающий коэффициент при оплате.
Отрицательный косинус
Из школьного курса геометрии известно, что cos (φ) = cos (-φ), то есть косинус любого угла будет положительной величиной. Но как же отличить индуктивную нагрузку от емкостной? Всё просто – электрики всех стран условились, что при емкостной нагрузке перед знаком косинуса ставится минус!
В практике пользования прибором анализа напряжения HIOKI у меня были случаи, когда значение косинуса было отрицательным. В последствии выяснилось, что была неправильно включена компенсаторная установка и произошла перекомпенсация. То есть cos φ Коэффициент реактивной мощности Тангенс φ
Часто более удобным является коэффициент реактивной мощности tg φ, который показывает отношение реактивной мощности к активной. Понятно, что при tg φ = 0 достигается идеал cos φ = 1.
Гармоники питающего напряжения
Кроме образования реактивной мощности, на промышленных предприятиях существует такой негативный фактор, как выработка гармоник напряжения питающей сети.
Гармоники – это та часть спектра питающего напряжения, которая отличается частоты промышленной сети 50 Гц. Как правило, гармоники образуются на частотах, кратных основной. Таким образом, 1-я (основная) гармоника имеет частоту 50 Гц, 2-я – 100, 3-я – 150, и так далее.
Для измерения гармоник напряжения существует формула:
Гармоники напряжения – формула расчета
Однако, эта формула не удобна на практике, поскольку не дает представления об уровне каждой гармонике в отдельности. Поэтому для практических целей используют формулу:
Коэффициент каждой гармоники напряжения
Таким образом, при измерении мы получим детальное распределение гармоник в спектре питающего напряжения, что позволит провести детальный анализ полученной информации и сделать правильные выводы.
Есть ещё гармоники тока, но там всё гораздо хуже…
На основе увеличения гармоник тока построен прибор для обмана счетчика. Кстати, там Автор прибора довольно убедительно доказал пользу своего изобретения)
PF или DPF?
Здесь надо сделать оговорку. Всё, что я говорил выше про косинус – относится к линейной нагрузке. Это означает, что напряжение и ток, хоть и гуляют по фазе, имеют форму синуса.
Но в реальном мире вся нагрузка не только не активная, но и не линейная. Значит, ток через неё имеет хоть и периодическую, но далеко не синусоидальную форму. Искаженная синусоида означает, что кроме первой гармоники имеются и другие, вплоть до бесконечности.
Вот как обстоят иногда дела:
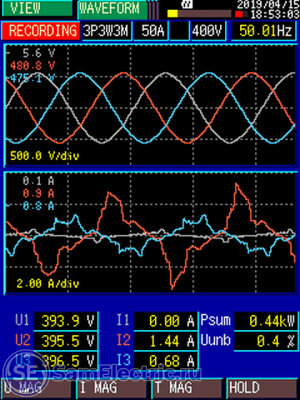
Формы напряжения и тока при нелинейной нагрузке
Гармоники напряжения, тока и мощности
Обычно, когда нагрузка симметричная (трехфазные потребители), за счёт принципов работы все гармоники, кратные 2 и 3, почти отсутствуют. В итоге остаются в основном 5, 7, 11, 13 гармоники, имеющие частоты соответственно частоты 250, 350, 550, 650 Гц.
Поэтому надо понимать, что та теория, что я расписал выше – для идеальных условий (без нелинейных искажений), которых в реале не бывает. Либо, если пренебречь высшими гармониками тока, и взять только первую (50 Гц), что обычно и происходит в жизни.
И если подходить к терминологии строго, то cos φ и PF (Power Factor) – это не одно и то же. PF учитывает также все гармоники напряжения и тока. И с учетом нелинейности реальный PF будет меньше.
Для учета коэффициента мощности в приборе HIOKI есть параметр DPF (Displacement Power Factor, смещённый коэффициент мощности), который учитывает только первую гармонику и равен cos φ.
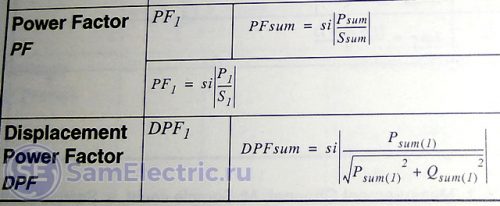
Коэффициенты мощности полный PF и смещённый DPF (для чистого синуса)
В итоге можно сказать, что справедливо выражение:
cos φ = DPF ≤ PF
Измерения на предприятии
При индуктивном характере нагрузки, который наблюдается на практике в большинстве случаев, ток отстает от напряжения (отрицательный сдвиг фаз), что видно на экране прибора HIOKI 3197 (табличные данные) при проведении измерений:
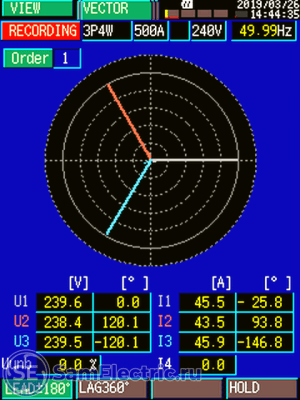
В данном случае видно, что ток отстает от напряжения примерно на 26°.
Из вышеприведенного измерения видно, что при угле отставания тока (сдвиге фаз) 26° cos φ = 0,898. Данный расчет подтверждается измеренным значением.
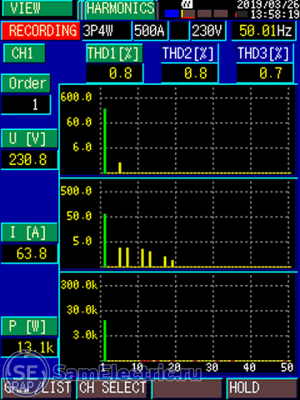
Измерение проводилось в течение около двух часов, за это время оборудование (нагрузка) циклически включалось и выключалось. За всё время измерения коэффициент нелинейных искажений напряжения THD не превысил 1,3% по каждой из фаз.
Результаты измерений приведены ниже:
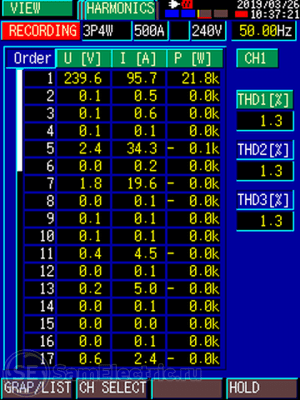
Измеренные гармоники напряжения, тока и мощности
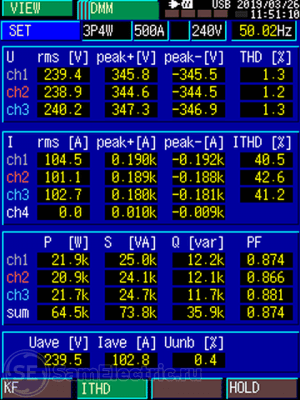
Режим мультиметра – на экране разные параметры
Для проверки проведём расчет по выше приведенной формуле для самых интенсивных гармоник (5, 7, 11):
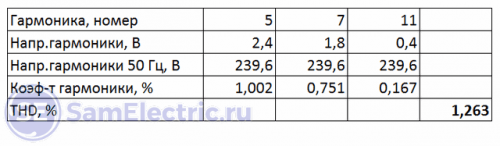
Расчет гармоник напряжения
Как видно, остальные гармоники имеют пренебрежимо малый вес.
Временной график THD:
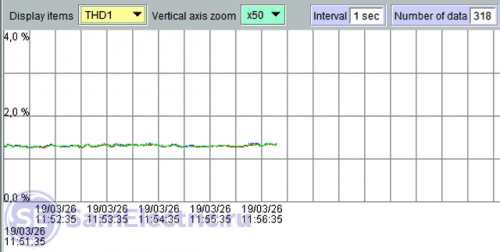
График THD (коэфта нелинейных искажений)
Временной график cosϕ:
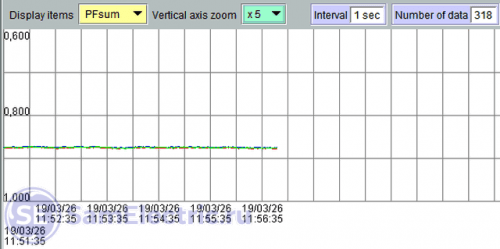
Анализ полученных результатов обследования
На предприятии нужно было выбрать компенсирующую установку для увеличения коэффициента мощности. Но перед её покупкой было решено обратить внимание на гармоники.
Были реальные случаи, когда из-за высокого уровня гармоник напряжения взрывались и загорались конденсаторные установки
В ГОСТ 13109-97 указан допустимый уровень гармонических искажений по напряжению, равный 8%. По проведенным измерениям, этот уровень не превышен. Однако, при увеличении мощности в 5 раз можно ожидать увеличение процента гармоник (THD) в то же количество раз. Следовательно, возможно увеличение коэффициента гармоник с 2,3 % до 11,5 %.
Однако, по рекомендациям производителей для безопасной эксплуатации батарей конденсаторов установок стандартного исполнения уровень THD не должен превышать 2 %. При этом уровень гармоник тока не учитывается и ГОСТом не регламентируется.
Следовательно, необходимо применять совместно с конденсаторными установками фильтры высших частот (фильтрокомпенсирующие устройства).
Рекомендации по уменьшению гармонических составляющих питающего напряжения
Для уменьшения гармоник напряжение рекомендуется сделать следующее:
Для выполнения приведенных рекомендаций желательно обратиться к инструкциям производителей и специалистам.
Креме того, рекомендуется проверить состояние питающих проводов, кабелей, клемм, переходных сопротивлений силовых соединений фазных и нейтральных проводов, качество соединений заземления корпусов электроприборов и т.д. В результате обследования выявлены преобразователи с отключенным заземлением.
Рекомендации по выбору компенсирующих устройств реактивной мощности
Мощность компенсирующего устройства выбирается исходя из мощности нагрузки, а также существующего и желаемого коэффициентов мощности.
Для расчета параметров можно воспользоваться следующей методикой.
Определить из таблицы коэффициент К, который считается по формулам на основе углов фаз некомпенсированного и компенсированного питания:
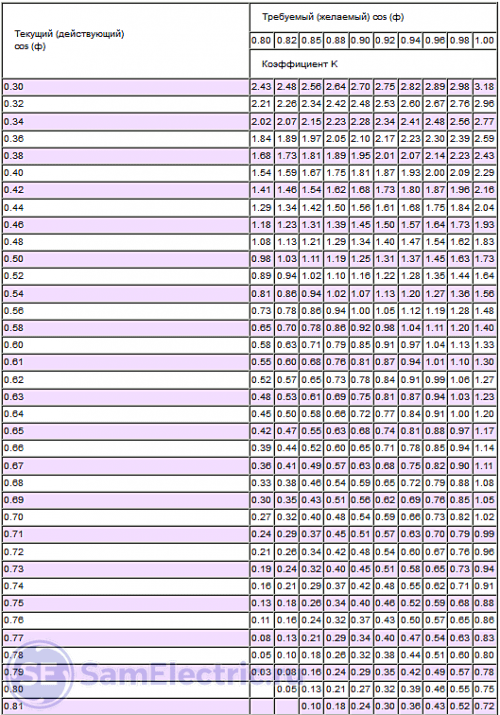
Таблица для определения коэффициента выбора конденсаторов
Например, текущий cosϕ = 0,7, желаемый cosϕ = 0,96. Тогда К = 0,73.
Как я уже говорил, не рекомендуется компенсировать реактивную мощность полностью (до cosϕ = 1), так как при этом возможна перекомпенсация (за счет переменной величины активной мощности нагрузки и других случайных факторов)
Этот тот самый случай, когда к идеалу стремиться не нужно)
Далее, необходимую емкостную мощность конденсаторных батарей определяют по формуле: Qc = КP (ВАр).
Например, в нашем случае, при мощности 1000 кВт полная мощность конденсаторной батареи будет 730 кВАр.
При выборе конденсаторной батареи она должна обладать следующими параметрами (не хуже):
(рекомендации даны поставщиком КУ)
На этом всё. Если есть желание что-то добавить, или поправить меня – как всегда, рад вашим комментариям!



