Автомат перекоса

Автомат перекоса — механизм для управления несущим винтом вертолётов, автожиров и конвертопланов[1]. Автомат перекоса обеспечивает управление вертикальным перемещением вертолёта, а также его наклоном по крену и тангажу; для этого автомат периодически изменяет угол установки каждой лопасти винта в зависимости от того, где лопасть оказывается в определённый момент времени в ходе вращения винта как целого.
Каждая из лопастей несущего винта, по сути, представляет собой небольшое крыло, создающее подъёмную силу за счёт набегающего потока воздуха. При этом действующая на лопасть подъёмная сила зависит от ряда факторов, в том числе от скорости движения лопасти относительно воздуха, а также её установочного угла, то есть угла между хордой лопасти и плоскостью вращения винта. Чем больше этот угол, тем большую подъёмную силу обеспечивает лопасть несущего винта.
В большинстве конструкций обороты несущего винта стараются поддерживать постоянными. В этом случае единственной переменной величиной остаётся установочный угол лопастей. При его одновременном увеличении для всех лопастей (то есть увеличении общего шага винта) суммарно развиваемая ими подъёмная сила увеличивается, а при уменьшении — соответственно уменьшается, что обеспечивает управление движением по вертикали: когда тяга несущего винта превышает действующую на летательный аппарат силу тяжести, он увлекается вверх, и наоборот.

Наклон вертолёта вперёд или назад (по тангажу) и вбок (по крену) достигается созданием разницы подъёмных сил, развиваемых лопастями несущего винта при его вращении, в зависимости от того, где находится лопасть в каждый момент времени. Так, например, для наклона вертолета вперёд лопасти несущего винта увеличивают свой установочный угол, проходя над задней частью вертолёта, и уменьшают над передней, что приводит к соответствующему изменению их подъёмных сил. Их разность создаёт момент, заставляющий вертолёт наклоняться вперёд.
Подъёмная сила несущего винта приложена к его втулке и в общем случае может быть рассмотрена как перпендикулярная его плоскости. При наклоне вертолёта в какую-либо сторону эта сила перестаёт быть строго вертикальной, в результате чего возникает противодействующий наклону момент сил «подъёмная сила — сила тяжести» (последняя приложена к центру тяжести вертолёта и направлена вертикально вниз); наклон прекратится, когда два упомянутых момента взаимно скомпенсируют друг друга. Помимо этого, при наклоне подъёмная сила приобретает горизонтальную составляющую в этом направлении, что используется для управления горизонтальным движением вертолёта.

Описанный выше момент аэродинамических сил, действующий на вращающийся винт, в силу гироскопического эффекта создаёт дополнительный прецессионный момент, приводящий к дополнительному наклону винта в направлении, перпендикулярном первоначальному. Для компенсации этого и прочих возмущений, в том числе связанных с перемещениями лопастей в соединяющих их со втулкой винта шарнирах, в работу автомата перекоса вводят дополнительные поправки.
Автомат перекоса вертолета. Общий принцип управления.
Привет, друзья!

Втулка несущего винта с автоматом перекоса вертолета МИ-8.
Снова вернемся к нашим вертолетам :-), этим красивым и удивительным (несмотря на их кажущуюся сегодня обычность) аппаратам. Поговорим немного подробнее о принципах их управления.
В статье «Как летает вертолет» я этого уже коснулся. Для того чтобы вертолет двигался поступательно, нужен перекос винта, и создает его такой агрегат, как автомат перекоса вертолета. Вот о нем сегодня и поговорим.
Как известно для вертолета полная аэродинамическая сила — это сумма всех сил, действующих на каждую лопасть в отдельности. Силы эти я бы разделил на искусственные и на естественные.
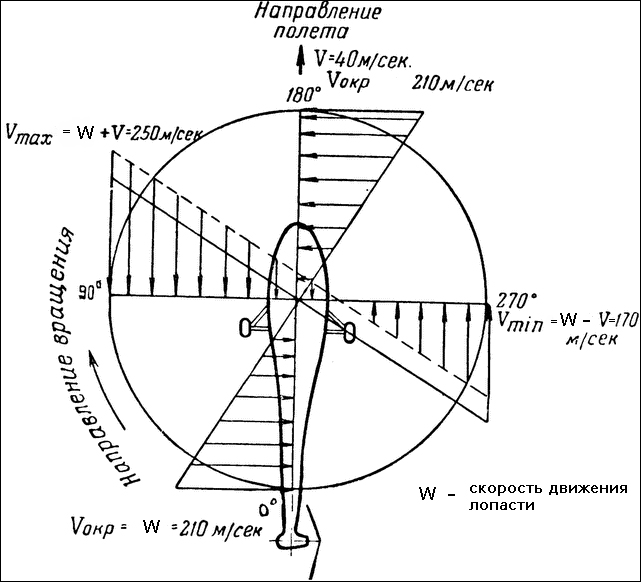
Изменение скоростей набегающего потока при вращении винта для вертолета МИ-1 (средние скорости полета).
Чтобы этого не происходило, конструктора применили одну хитрость. Дело в том, что лопасти несущего винта закреплены во втулке (это такой массивный узел, насаженный на выходной вал), но не жестко. Они с ней соединены с помощью специальных шарниров (или устройств, им подобных). Шарниры бывают трех видов: горизонтальные, вертикальные и осевые.
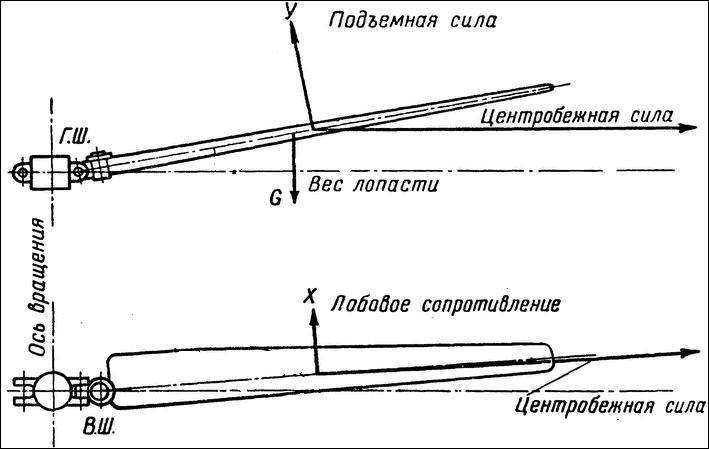
Силы, действующие на лопасть, подвешенную ко втулке винта на шарнирах.
Теперь посмотрим что же будет происходить с лопастью, которая подвешена к оси вращения на шарнирах. Итак, наша лопасть вращается с постоянной скоростью без каких-либо управляющих воздействий извне.
От 0º до 90º скорость обтекания лопасти растет, значит растет и подъемная сила. Но! Теперь лопасть подвешена на горизонтальном шарнире. В результате избыточной подъемной силы она, поворачиваясь в горизонтальном шарнире, начинает подниматься вверх ( специалисты говорят «делает взмах »). Одновременно из-за увеличения лобового сопротивления (ведь скорость обтекания возросла) лопасть отклоняется назад, отставая от вращения оси винта. Для этого как раз и служит вертикальный шарнир.
Однако при взмахе получается, что воздух относительно лопасти приобретает еще и некоторое движение вниз и, таким образом, угол атаки относительно набегающего потока уменьшается. То есть рост избыточной подъемной силы замедляется. На это замедление оказывает свое дополнительно влияние отсутствие управляющего воздействия. Это значит, что тяга автомата перекоса, присоединенная к лопасти, сохраняет свое положение неизменным, и лопасть, взмахивая, вынуждена поворачиваться в своем осевом шарнире, удерживаемая тягой и, тем самым, уменьшая свой установочный угол или угол атаки по отношению к набегающему потоку. (Картина происходящего на рисунке. Здесь У – это подъемная сила, Х – сила сопротивления, Vy – вертикальное движение воздуха, α – угол атаки.)
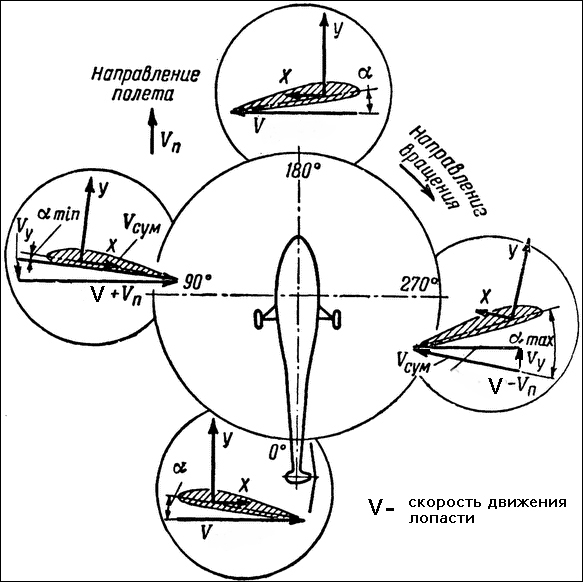
Картина изменения скорости и угла атаки набегающего потока при вращении лопасти несущего винта.
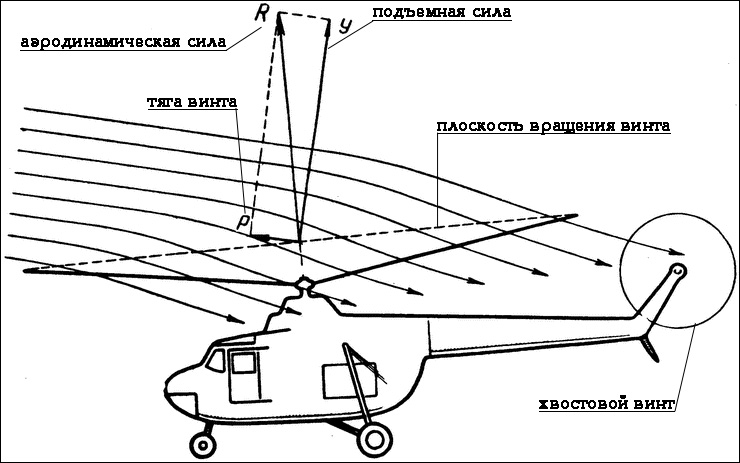
Силы, действующие на вертолет.
Теперь главная мысль :-). В известной статье я уже говорил, что для придания вертолету поступательного движения нужно эту плоскость наклонить, дабы появилась горизонтальная составляющая полной аэродинамической силы, то есть горизонтальная тяга винта. Иначе говоря, нужно наклонить весь воображаемый конус вращения винта. Если вертолету нужно двигаться вперед, значит конус должен быть наклонен вперед.
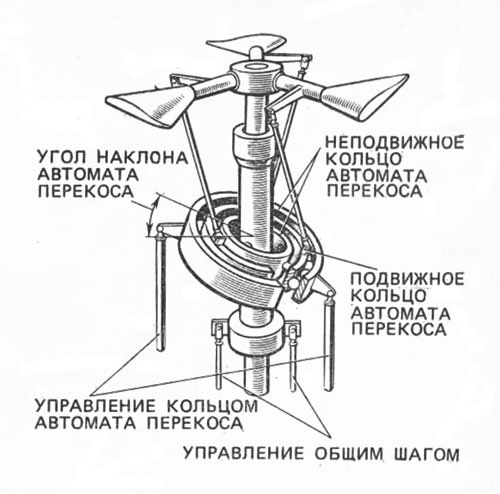
Такие действия как раз и выполняет автомат перекоса вертолета. Он изменяет угол установки лопастей несущего винта (шаг винта), вращая их в осевых шарнирах посредством присоединенных к ним тяг. Обычно всегда присутствуют два канала управления: по тангажу и по крену, а также канал изменения общего шага несущего винта.
Конструктивно автомат перекоса вертолета выполнен достаточно сложно, но пояснить его устройство вполне можно на примере аналогичного узла модели вертолета. Модельный автомат, конечно, устроен попроще своего старшего собрата, но принцип абсолютно тот же :-).
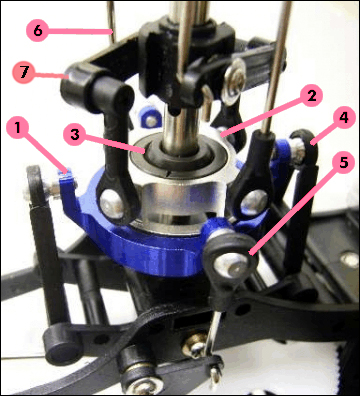
Автомат перекоса модели вертолета.
Для более лучшего понимания помещаю еще несколько иллюстраций втулки винта с автоматом перекоса. Комментировать их нет смысла :-)…
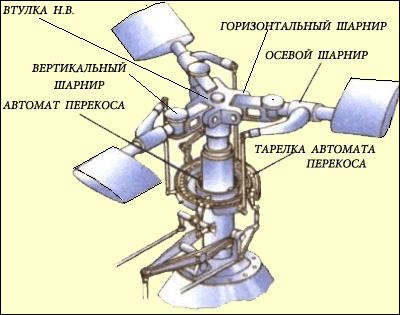
Втулка винта с автоматом перекоса (схема).
Поворот лопасти в вертикальном шарнире втулки несущего винта.
Изменение общего шага винта, лопасти поворачиваются в осевых шарнирах.
Вот пожалуй и все. Как видите, принципиально все достаточно просто. Конечно в практическом плане автомат перекоса вертолета — агрегат сложный, включающий в себя различные специальные узлы и устройства.

Втулка несущего винта с автоматом перекоса вертолета МИ-2.
В одной из следующих статей мы этого коснемся, а также рассмотрим как же непосредственно управляется вертолет из кабины пилота с использованием автомата перекоса и специальных органов управления.
В заключение я предлагаю вам посмотреть два ролика, которые достаточно наглядно иллюстрируют работу автомата перекоса несущего винта. Полезного просмотра и до новых встреч :-)…
Принцип работы вертолета
ПРИНЦИП ПОЛЁТА И ОБЩЕЕ УСТРОЙСТВО ВЕРТОЛЁТА
Рис. 2. Основные части вертолета:
1 – фюзеляж; 2 – авиадвигатели; 3 – несущий винт; 4 – трансмиссия;
5 – хвостовой винт; 6 – концевая балка; 7 – стабилизатор; 8 – хвостовая балка; 9 – шасси
Фюзеляж является основной частью конструкции вертолета, служащей для соединения в одно целое всех его частей, а также для размещения экипажа, пассажиров, грузов, оборудо-вания. Он имеет хвостовую и концевую балки для размещения хвостового винта вне зоны вращения НВ, и крыла (на некоторых вертолетах крыло устанавливается с целью увеличения максимальной скорости полета за счет частичной разгрузки – (МИ-24)).
Силовая установка (двигатели) является источником механической энергии для приведения во вращение несущего и рулевого винтов. Она включает в себя двигатели и системы, обеспечивающие их работу (топливную, масляную, систему охлаждения, систему запуска двигателей и др.).
Несущий винт служит для поддержания и перемещения вертолета в воздухе, и состоит из лопастей и втулки НВ.
Трансмиссия служит для передачи мощности от двигателя к несущему и рулевому винтам. Составными элементами трансмиссии являются валы, редукторы и муфты.
Рулевой винт (РВ) (бывает тянущий и толкающий) служит для уравновешивания реактивного момента, возникающего при вращении НВ, и для путевого управления вертолетом. Сила тяги РВ создает момент относительно центра тяжести вертолета, уравновешивающий реактивный момент от НВ. Для разворота вертолёта достаточно изменить величину тяги РВ. РВ так же состоит из лопастей и втулки.
Система управления (СиУпр) вертолета состоят из ручного и ножного управления.
Они включают командные рычаги (ручку управления, рычаг «шаг-газ» и педали) и системы проводки к НВ и РВ. Управление НВ-ом производится при помощи специального устрой-ства, называемого автоматом перекоса. Управление РВ производится от педалей.
Взлетно-посадочные устройства (ВПУ) служат опорой вертолета при стоянке и обеспечивают перемещение вертолета по земле, взлет и посадку. Для смягчения толчков и ударов они снабжены амортизаторами. Взлетно-посадочные устройства могут выполняться в виде колесного шасси, поплавков и лыж.
Рис. 3. Общий вид конструкции вертолёта (на примере боевого вертолёта МИ-24П).
Автомат перекоса: принцип работы устройства
Автоматы перекоса позволяют контролировать полет вертолета. Современные модификации выделяются высоким углом наклона по крену и тангажу.
Стандартный автомат включает в себя набор стоек и опор. Подвижное кольцо устройства крепится в верхней части механизма. Под ним располагается большая тарелка. Подшипники тяги могут находиться над стойкой или втулкой. Хордовые лопасти подсоединены к тарелке. В нижней части модификаций располагаются шарниры крепления. Под ними находится непосредственно ротор.
Принцип работы автоматов перекоса
Принцип действия автомата перекоса построен на изменении положения винтов. Осуществляется данный процесс за счет смены угла наклона опор. Нижнее кольцо отвечает за стабилизацию тяги. Для управления вертолетом по тангажу применяются задние стойки. Угол наклона у них ограничен. Подъемная сила вертолета регулируется при помощи передних стоек. Плавность вращения лопастей обеспечивается сферическими подшипниками. Однако, в данном случае многое зависит от типа модификации.
Типы автоматов перекосов
Разделение автоматов осуществляется по количеству лопастей. Трехлопастные устройства, как правило, устанавливаются с двойными кольцами. Модификации на четыре лопасти считаются более распространенными. Переходные модификации отличаются наличием широких тарелок в нижней части конструкции. Существуют коленчатые модификации и устройства с крыльчаткой. В отдельную категорию выделены ходовые модификации, которые используются на автожирах.
Модификации на три винта
Модели на три винта замечательно подходят для вертолетов. Несущие стойки используются разных размеров. Диаметр нижнего кольца, как правило, составляет не более 22 см. У многих модификаций используется несколько тарелок. Управление по тангажу осуществляется через переднюю тягу. Подшипники сферического типа применяются в автоматах довольно часто.
Непосредственно неподвижная тарелка может устанавливаться под кольцом или над ним. У многих моделей винты крепятся через стойки. Отклонение тарелки в данном случае зависит от размеров боковых стоек. Установочные углы определяются формой тарелки. Втулки чаще всего располагаются в нижней части конструкции. Недостатком устройств на три лопасти считается малый циклический шаг.
Модели на четыре винта
Устройства на четыре лопасти в основном производятся с кулачковым механизмом. У многих модификаций угол наклона по тангажу не превышает 40 градусов. Проблемы с перекосом контролируются несущими винтами. Если верить экспертам, то модификации со сдвоенными втулками встречаются довольно редко. Вращающиеся кольца устанавливаются различных размеров.
Многие специалисты говорят о том, что подшипники сферического типа хорошо себя зарекомендовали. У многих моделей применяется блокировщик для стойки. Таким образом, наклон по крену у автомата сильно ограничен. Проблемы с перекосом модификации не страшны. Устанавливаются модификации в основном через шарниры.
Переходные устройства
Переходные автоматы широко применяются на вертолетах различных производителей. К преимуществам устройств следует отнести стабильность. Наклон по тангажу регулируется только передними стойками. Предельный угол наклона по тангажу у модификаций данного типа равняется 35 градусов.
Подшипники у автоматов, как правило, применяются сферического типа. При этом накладки под них встречаются очень редко. Отдельно важно отметить, что существуют модификации под автожиры. Стойки у них применяются вытянутой формы. Тарелки довольно часто фиксируются в верхней части механизма. Циклический шаг лопастей зависит от размеров фиксированного кольца. Блокировка у стойки встречается довольно часто. Над тарелкой находятся втулки, которые защищают лопасти.
Соосные модификации с крыльчаткой
Соосный автомат перекоса с крыльчаткой подходит для конвертопланов. Сила тяги у моделей довольно высокая. Если верить экспертам, то стойки применяются небольшой длины. Установка подшипников осуществляется на тарелки. Модификации с большими переходниками встречаются очень редко. Угол наклона винтов по тангажу, как правило, не превышает 40 градусов. У многих автоматов блокиратор отсутствует. Установка устройств стандартно осуществляется на ротор. В данном случае втулки устанавливаются в два ряда.
Крыльчатки применяются с шарнирными креплениями, которые находятся в нижней части конструкции. По мнению экспертов, тяговая сила модификаций зависит от диаметра тарелок. Циклический шаг лопастей тесно связан с размером стоек, которые находятся по бокам от тарелок с неподвижными кольцами. Подшипники сферического типа у автоматов с крыльчаткой встречаются очень часто. Многие специалисты утверждают, что модификации страдают отклонением тарелки. Наклон по крену в устройствах сильно ограничен.
Коленчатые устройства
Коленчатые модификации у вертолетов встречаются довольно редко. Сила тяги у них, как правило, находится на высоком уровне. Если говорить про недостатки, то важно упомянуть о сложной управляемости механизма при сильных порывах ветра. Если верить мнению экспертов, то несущие винты располагаться должны в верней части модификации. Для решения проблем с уклоном тарелки устанавливается блокиратор. Непосредственно передние стойки фиксируются на тарелки.
Предельный угол наклона по тангажу составляет около 40 градусов. Многие модификации производятся без сферических подшипников. Тарелки применяются с накладками и без них. Модификации с подвижными кольцами встречаются довольно редко. Вращательный момент у тарелок высокий. Стойки за креплением используются небольшой ширины. Внутренние кольца у модификаций данной серии способны выдерживать большие нагрузки. Также стоит отметить, что на рынке представлены модификации с нижним расположением несущих винтов. В таком случае передние стойки применяются небольшой высоты и крепятся под тарелкой.
Сила подъема у автоматов данной серии довольно высокая. Для современных модификаций они подходят замечательно. Из недостатков можно выделить малый угол по тангажу. На сферические подшипники оказывается большая нагрузка. Наклон по крену максимум достигает 50 градусов. Блокировка стоек используется очень редко. Установка автоматов данного типа осуществляется только на роторы через шарниры.
Ходовые устройства
Их можно использовать на вертолетах и конвертопланах. Многие модификации применяются с длинными стойками и широкой тарелкой. Несущие винты, как правило, находятся в верхней части автомата. Наклон по тангажу в данном случае зависит от ширины подвижного кольца. Проблемы с перекосом винтов у модификаций возникают очень редко.
Защитные втулки устанавливаются над переходником. Крепление к ротору происходит только через шарниры. При этом внутренние кольца часто применяются небольшого диаметра. Основная нагрузка у механизмов оказывается именно на стойки. Циклический шаг у лопастей не сильно высокий. Также стоит отметить, что модификации данного типа выделяются качественными блокираторами. Шаровые опоры на автоматах встречаются очень редко.
Модификация Сикорского
Автомат перекоса Сикорского является надежным и отличается прочными стойками. Тарелки в данном случае применяются на 23 см. Проблемы с наклоном по тангажу возникают нечасто. Несущие винты у моделей находятся выше уровня тарелок. Установка по вертикали осуществляется очень быстро. Многие специалисты говорят о том, что регулировка по крену происходит очень плавно. Достигнут данный эффект был за счет установки небольших стоек. Предельный угол наклона по тангажу равняется 40 градусов.
Шаровые опоры применяются с накладками. Недостатком модификаций принято считать малый вращающийся момент. Кольца в устройствах изнашиваются довольно быстро. Отдельного внимания у модификаций заслуживают шарниры. Располагаются они в нижней части конструкции, что позволяет просто регулировать отклонение тарелок.
Особенности модели серии МИ 8Т
Данный автомат перекоса винта применяется на вертолетах разных серий. Несущие винты у него установлены на уровне кольца. Работа автомата перекоса осуществляется путем смены положения лопастей. Если верить мнению экспертов, то шаровые опоры способны выдерживать большие нагрузки. В данном случае циклический шаг контролируется отлично. Подшипники у автомата применяются сферического типа. Западание подшипников при наклоне происходит редко.
При этом износ у колец очень малый. Отдельного внимания заслуживают компактные шарниры. На ротор модификация устанавливается очень плотно. Круговые движения осуществляются плавно, нагрузка на подшипники распределяется равномерно. Предельный наклон по тангажу равняется 30 градусам. Многие эксперты говорят, что тарелки и при больших оборотах быстро стабилизируются. Отдельно важно отметить, что предельный наклон по крену не превышает 20 градусов.
Параметры модификации серии АВ-1
Представленный автомат перекоса фаз выделяется низкими стойками. Предельный наклон по тангажу в данном случае равняется 50 градусов. Подшипники тяги применяются с накладками. Если верить мнению экспертов, то проблемы с блокировкой стойки возникают очень редко. Тарелка в данном случае установлена на 23 см. Несущие винты у модификации находятся выше уровня тарелки. Втулки в данном случае способны прослужить долгое время.
Отклонение тарелки контролируется на хорошем уровне. Циклический шаг лопасти регулируется только передними стойками. Наклон по крену равняется 30 градусов. Установка по вертикали выполняется довольно быстро. Подшипники сферического типа располагаются только над тарелкой.
Отличия устройств В 912
Данный автомат перекоса выделяется хорошим переходником. Устройство относится к кулачковым механизмам, обладает отличной стабилизацией. Шарниры крепления находятся в нижней части модификации. Подшипники применяются только на тарелке. Установка лопастей по вертикали много времени не отнимает. Предельный угол наклона по крену равняется 25 градусов. Также стоит отметить, что вращающиеся кольца используются диаметром в 34 см.
Защитные втулки применяются только на передних стойках. Предельный угол наклона по крену не превышает 55 градусов. Проблемы с прекосами этому автомату не страшны. Крепление модификации на ротор стандартно осуществляется через шарниры. Многие специалисты отмечают, что регулировка лопастей по горизонтали происходит очень быстро. Блокировка стойки у модели отсутствует.
Особенности модели серии В 915
Отличается большим наклоном по крену. Относится устройство к коленчатым типам. Несущие винты располагаются на уровне подшипников тяги. Если верить экспертам, то пробелы с перекосом не наблюдаются. При этом защитные втулки находятся под стойкой и над ней. Ходовые лопасти способны выдерживать большие нагрузки.
Шаровые опоры в данном случае применяются с накладками. Предельный угол наклона по тангажу равняется 55 градусов. По словам специалистов, блокиратор работает хорошо. Среди недостатков стоит упомянуть о быстром износе колец. Циклический шаг лопастей регулируется не очень плавно. Крепление у шарниров оставляет желать лучшего. Для конвертопланов модификация данной серии не подходит.
Параметры модификации серии В 920
Модель производится с четырьмя стойками. Вращаются они свободно, предельный угол крена равняется 35 градусов. Несущие винты установлены на уровне подшипникового ряда. Тарелка используется из нержавеющей стали, а ее диаметр равняется 4 см. Многие эксперты говорят о том, что модификация производится с качественными шарнирами крепления, и в установке она довольно проста.
Втулки располагаются только над защитным кольцом. Предельный угол наклона по тангажу составляет 50 градусов. Вращающееся кольцо производителем применяется на 30 см. Блокировка стойки у данного автомата отсутствует. Некоторые эксперты говорят о том, что модификация может применяться на автожирах. Также стоит отметить, что у модели установлено две шаровые опоры. Проблемы с прекосом им не страшны.
Отличия устройств V922-04
Вращающееся кольцо применяется диаметром в 30 см. Подшипники у автомата используются только сферического типа. Шаровые опоры у модификации отсутствуют. Блокировка стойки стандартно установлена под тарелкой. Подшипники тяги применяются без накладок. Установка лопастей по горизонтали происходит довольно быстро. Отклонение тарелки происходит очень редко. При этом циклический шаг лопастей регулируется без проблем.
Особенности модели МИ-8
Автомат перекоса вертолета МИ-8 имеет массу преимуществ. В первую очередь важно отметить, что модификация относится к переходным устройствам. Несущие винты в данном случае располагаются на уровне втулок. Установка по вертикали занимает довольно много времени. Предельный угол по крену составляет не более 40 градусов. Ходовые лопасти способны выдерживать больше нагрузки. Также стоит отметить, что автомат перекоса МИ-8 делается со сферическими подшипниками. Многие эксперты указывают на низкую прочность опор. При этом тарелка применяется малого диаметра. Отдельного внимания в устройстве заслуживает малый угол наклона по тангажу. Шаровые опоры в данном случае установлены над тарелкой. Крепеж модификации осуществляется через ротор. Крепления в данном случае применяются небольшой ширины. Отклонения тарелки при значительных нагрузках сильно заметны. При подъеме большая нагрузка направляется именно на шаровые опоры.
Параметры модификации серии 8-1950-000
Автомат перекоса 8-1950-000 пользуется большим спросом. Подходит он не только для вертолетов, но и автожиров. Автомат перекоса 8-1950-000 оснащен качественными опорными стойками. Установка лопастей по вертикали происходит быстро. При этом проблемы со стабилизацией тарелки модификации не страшны.
Отличия устройств 8-1975-000
Это качественный кулачковый автомат перекоса вертолета. Принцип действия устройства построен на изменении угла наклона лопастей. Если говорить про показатели, то диаметр тарелки равняется только 34 см. Несущие винты располагаются на уровне сферических подшипников.
Модификация способна выдерживать большие нагрузки. Однако важно отметить, что максимальный угол по крену не превышает 40 градусов. Блокировка стойки в данном случае отсутствует. Отдельного внимания заслуживает компактная шаровая опора. Проблемы со скручиванием ей не страшны. Установка лопастей по вертикали происходит довольно быстро.
Для регулировки циклического шага лопастей применяются передние опоры. Для конвертопланов модификация этой серии не подходит. Шарнирные крепления у нее находятся под тарелкой. Защитное кольцо у модификации фиксируется на втулке. Накладка на шаровой опоре изнашивается очень медленно. Для автожиров данный автомат перекоса не подходит.
СИСТЕМА МЕХАНИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТА
Управление вертолетом может осуществляться:
– летчиком, а также механизмами и устройствами, служащими для облегчения процесса управления и улучшения его качества (полуавтоматическая система);
– системой, в которой создание и изменение управляющих сил и моментов осуществляется комплексом автоматических устройств, а роль летчика сводится к отладке этих устройств и наблюдению за правильностью их работы.
СУ вертолетом состоит из ручного и ножного управления.
Ручное управление предназначено для воздействия на автомат перекоса (АП) НВ и разделяется на управление общим шагом (управление подъемной силой НВ по оси У) и циклическим шагом НВ (продольное и поперечное управление относительно осей X и Z).
Управление общим шагом летчик осуществляет при помощи рычага, расположенного слева от него. Управление циклическим шагом НВ производится правой рукой.
Ножным управлением создается момент М относительно вертикальной оси вертолета и осуществляется путевое управление (рысканье). На вертолете одновинтовой схемы путевое управление предназначено для изменения общего шага РВ, на вертолетах соосной схемы – для дифференциального изменения общего шага НВ.
Движение рук и ног летчика при управлении вертолетом соответствует естественным рефлексам человека. При перемещении ручки вперед, т.е. от себя, вертолет опускает нос (появляется пикирующий момент тангажа Мг относительно оси Z) и увеличивает горизонтальную скорость полета Vх при повышении мощности двигателя.
При движении ручки назад, т.е. на себя, появляется кабрирующий момент Мz и происходит соответствующее движение вертолета назад (вперед хвостом).
Движение ручки влево вызывает левый крен вертолета (относительно оси X) и при увеличении мощности двигателя – полет боком влево вдоль оси Z. Движение ручки вправо вызывает правый крен и полет боком вправо.
Движением левой ноги вперед вертолет поворачивается налево, правой ноги – направо.
Требования к системе управления вертолётом
Основной задачей конструктора является создание такой СУ, которая наиболее точно осуществляет кинематическую связь между командными рычагами и органами управления. Эта задача значительно усложняется при увеличении полетной массы вертолета из-за роста нагрузок на органы управления, а также вследствие увеличения расстояния между командными рычагами и органами управления.
Летчик в общем случае решает две по существу различные задачи: одна из них – стабилизация положения вертолета в пространстве; вторая – управление траекторией полета вертолета. Наиболее эффективным средством улучшения устойчивости вертолета с шарнирным НВ является система автоматической стабилизации, называемая автопилотом.
Включение автопилота в СУ вертолета производится по дифференциальной схеме (рис. 3.1.2).
Рис. 3.1.2. Включение автопилота в систему управления по дифференциальной схеме: 1 – муфта автотриммера; 2 – загрузочная пружина; 3 – ручка управления; 4 – раздвижная тяга; 5 – силовой цилиндр; 6 – автопилот
В этой схеме применяются рулевые приводы, работающие одновременно как от сигналов автопилота, так и от воздействия летчика. При дифференциальном включении рулевых машин рычаг управления, например, ручка, может быть неподвижным (или перемещаться летчиком), в то время как соответствующий орган управления независимо от ручки отклоняется под воздействием сигналов автопилота, но его максимально возможное отклонение обычно ограничено диапазоном шириной около 20% полного хода.
В то же время для быстрого изменения режима полета или при отказе автопилота летчик всегда может вмешиваться в управление, непосредственно отклоняя ручку управления. Дифференциальное включение автопилота обеспечивает устойчивость вертолета на всех режимах в течение всего времени полета.
Вертолеты, управление которыми невозможно или затруднительно без применения гидроусилителей (ГУ) или бустеров, должны иметь, кроме основной гидравлической системы, дублирующую. На вертолетах, управление которыми возможно без усилительных механизмов, допускается установка только основной усилительной системы.
ГУ состоит из исполнительного механизма (силового привода), следящего элемента (золотника) и связи между ними (рис. 3.1.3).
Рис. 3.1.3. Принципиальная схема работы гидроусилителя:
1 – ручка управления; 2 – ограничитель хода золотника; 3 – головка ГУ; 4 – золотник; 5 – силовой цилиндр; 6 – поршень силового штока
При нейтральном положении золотника гидросмесь не поступает в силовой цилиндр и система остается неподвижной. Если сдвинуть золотник, то одна из полостей цилиндра соединяется с питающей магистралью гидросистемы, а другая – со сливной. Под действием разности давлений в полостях шток силового цилиндра начнет перемещаться, поворачивая лопасть относительно осевого шарнира. Одновременно со штоком в ту же сторону будет перемещаться и корпус золотника (через механическую обратную связь), стремясь снова перекрыть питающую и сливную магистрали. Если летчик или автопилот перестанут смещать золотник – он остановится. Таким образом, каждому положению тяги управления золотником, а следовательно, и ручки управления, связанной с ним, соответствует свое положение исполнительного штока.
На вертолетах по всех каналах применяют необратимую бустерную систему управления. Усилия, возникающие в проводке управления от шарнирных моментов на органах управления, не передаются на рычаги управления вертолетом, т.к. целиком воспринимаются ГУ. Для имитации усилий от органов управления в систему включаются загрузочные механизмы. В этом случае пилот преодолевает усилие не от шарнирных моментов лопастей, а от сжатия или растяжения пружины загрузочного механизма (рис. 3.1.4). К загрузочному устройству присоединяется т.н. механизм триммерного эффекта. При включении этого механизма снимается (по желанию пилота при длительном полете) усилие с ручки (педали).
Рис. 3.1.4. Схемы «автотриммирования»:
а – схема «автотриммирования» с применением электромеханизма: 1 – электромеханизм с самотормозящейся червячной парой; 2 – концевые выключатели;3 – триммерная кнопка; 4 – ручка управления; 5 – пружинный механизм
б – схема «автотриммирования» с применением электромагнитной муфты: 1 – электромагнитная муфта; 2 – триммерная кнопка; 3 – ручка управления; 4 – пружинный механизм
Люфты в управлении неблагоприятно влияют на управляемость вертолета. Если имеется люфт на участке между ручкой и золотником ГУ, то после страгивания ручки золотник переместится лишь после выбора люфта. При наличии люфта между ручкой и загрузочным механизмом летчик ощутит усилие от последнего уже после начала поворота лопастей и реагирования вертолета. Это нарушение чувства управления может вызвать раскачку вертолета.
Появление чрезмерного суммарного люфта в проводке управления может привести к самопроизвольному перемещению управляющих золотников и включению ГУ.
В СУ вертолета должна быть обеспечена независимость действия продольного, поперечного, путевого управления и общего шага НВ.
Рекомендуется не превышать следующих значений отклонения рычагов управления:
±170 мм – для продольного отклонения ручки;
± 125 мм – для поперечного отклонения ручки;
± 100 мм – для отклонения педалей.
Вертолёт Ка-32
Транспортный вертолёт Chinook-46 (США)
Первый в мире электровертолёт



