Интерфейсы микроконтроллеров (Часть 1)
Итак что же такое интерфейс?
Вездесущая Википедия дает такой ответ: Физический (аппаратный) интерфейс — способ взаимодействия физических устройств. Чаще всего речь идёт о компьютерных портах.
Т.е. если мы попытаемся связать наш микроконтроллер с другими устройствами нам потребуется знать определенный набор правил, методов и характеристик оборудования, чтобы сделать это безболезненно. Давайте рассмотрим основные типы интерфейсов, которые мы можем встретить «на борту» микроконтроллера.
Последовательный интерфейс UART/USART
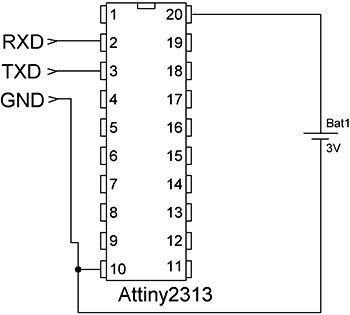
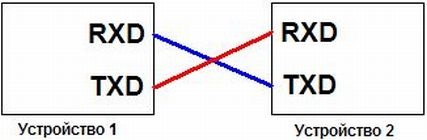
Подключать UART надо, так сказать «наоборот» RXD к TXD, а TXD к RXD как на картинке ниже:
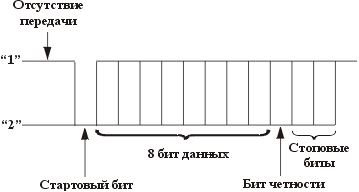
Все сигналы UART передаются специально выбранными уровнями, обеспечивающими высокую помехоустойчивость связи. Отметим, что данные передаются в инверсном коде (логической единице соответствует низкий уровень, логическому нулю — высокий уровень. Более подробно о логических уровнях смотрите тут — www.drive2.ru/b/2528993/).
Формат передаваемых данных показан на рисунке 4. Собственно данные (5, 6, 7 или 8 бит) сопровождаются стартовым битом, битом четности и одним или двумя стоповыми битами. Получив стартовый бит, приемник выбирает из линии биты данных через определенные интервалы времени. Очень важно, чтобы тактовые частоты приемника и передатчика были одинаковыми, допустимое расхождение — не более 10%). Скорость передачи по RS-232C может выбираться из ряда: 110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 бит/с.
Последовательный периферийный интерфейс SPI
Последовательный периферийный трехпроводный интерфейс SPI (Serial Peripheral Interface) предназначен для организации обмена данными между двумя устройствами. С его помощью может осуществляться обмен данными между микроконтроллером и различными устройствами, такими, как цифровые потенциометры, ЦАП/АЦП, FLASH-ПЗУ и др. С помощью этого интерфейса удобно производить обмен данными между несколькими микроконтроллерами AVR.
Кроме того, через интерфейс SPI может осуществляться программирование микроконтроллера.
Изначально он был придуман компанией Motorola, а в настоящее время используется в продукции многих производителей. Его наименование является аббревиатурой от ‘Serial Peripheral Bus’, что отражает его предназначение — шина для подключения внешних устройств. Шина SPI организована по принципу ‘ведущий-подчиненный’. В качестве ведущего шины обычно выступает микроконтроллер, но им также может быть программируемая логика, DSP-контроллер или специализированная ИС. Подключенные к ведущему шины внешние устройства образуют подчиненных шины. В их роли выступают различного рода микросхемы, в т.ч. запоминающие устройства (EEPROM, Flash-память, SRAM), часы реального времени (RTC), АЦП/ЦАП, цифровые потенциометры, специализированные контроллеры и др.
Главным составным блоком интерфейса SPI является обычный сдвиговый регистр, сигналы синхронизации и ввода/вывода битового потока которого и образуют интерфейсные сигналы. Таким образом, протокол SPI правильнее назвать не протоколом передачи данных, а протоколом обмена данными между двумя сдвиговыми регистрами, каждый из которых одновременно выполняет и функцию приемника, и функцию передатчика. Непременным условием передачи данных по шине SPI является генерация сигнала синхронизации шины. Этот сигнал имеет право генерировать только ведущий шины и от этого сигнала полностью зависит работа подчиненного шины.
Электрическое подключение
Существует три типа подключения к шине SPI, в каждом из которых участвуют четыре сигнала.
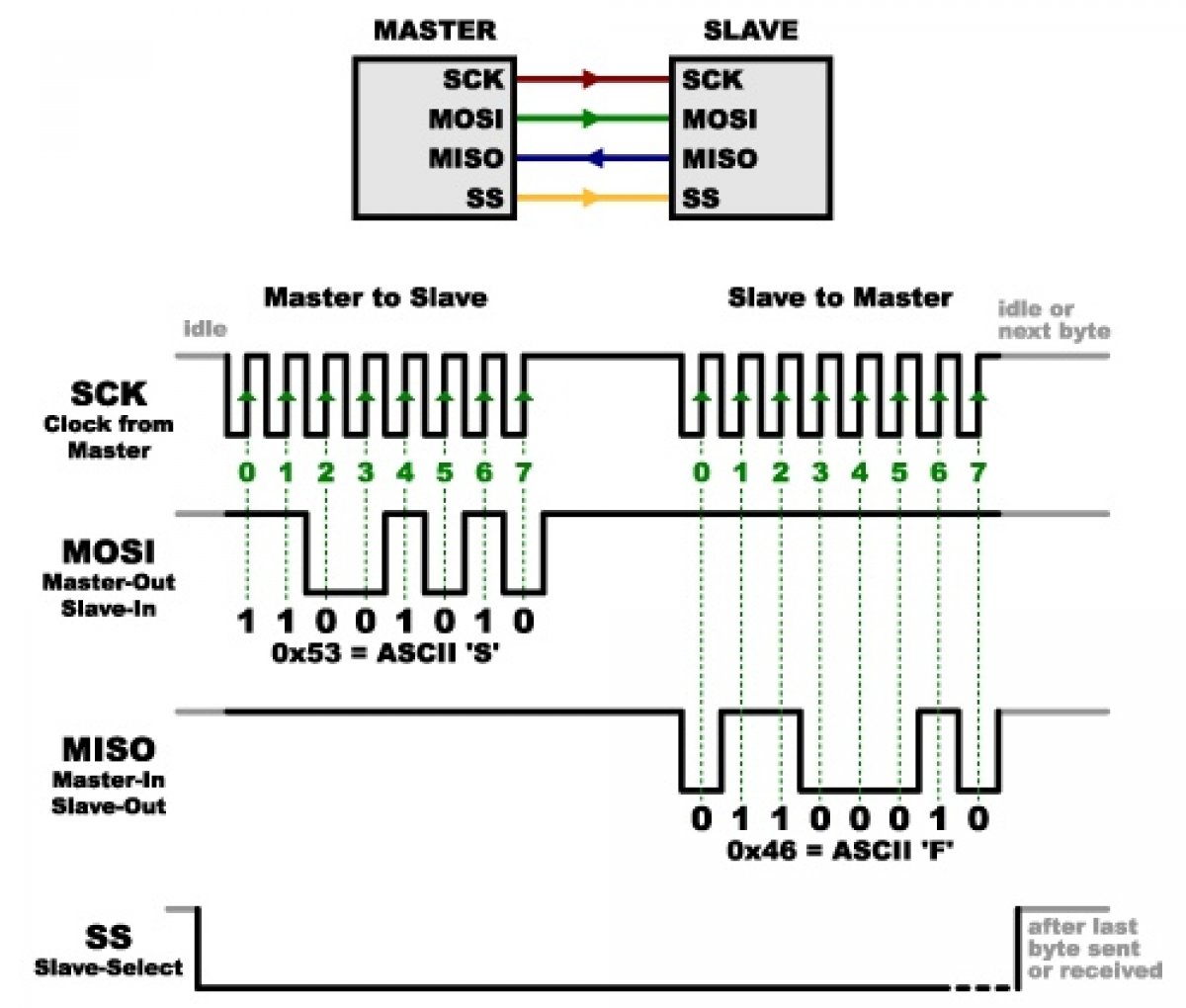
Самое простое подключение, в котором участвуют только две микросхемы, показано на рисунке 6. Здесь, ведущий шины передает данные по линии MOSI синхронно со сгенерированным им же сигналом SCLK, а подчиненный захватывает переданные биты данных по определенным фронтам принятого сигнала синхронизации. Одновременно с этим подчиненный отправляет свою посылку данных. Представленную схему можно упростить исключением линии MISO, если используемая подчиненная ИС не предусматривает ответную передачу данных или в ней нет потребности. Одностороннюю передачу данных можно встретить у таких микросхем как ЦАП, цифровые потенциометры, программируемые усилители и драйверы. Таким образом, рассматриваемый вариант подключения подчиненной ИС требует 3 или 4 линии связи. Чтобы подчиненная ИС принимала и передавала данные, помимо наличия сигнала синхронизации, необходимо также, чтобы линия SS была переведена в низкое состояние. В противном случае, подчиненная ИС будет неактивна. Когда используется только одна внешняя ИС, может возникнуть соблазн исключения и линии SS за счет жесткой установки низкого уровня на входе выбора подчиненной микросхемы. Такое решение крайне нежелательно и может привести к сбоям или вообще невозможности передачи данных, т.к. вход выбора микросхемы служит для перевода ИС в её исходное состояние и иногда инициирует вывод первого бита данных.

При необходимости подключения к шине SPI нескольких микросхем используется либо независимое (параллельное) подключение (рис. 7), либо каскадное (последовательное) (рис. 8).
Последовательный периферийный интерфейс SPI
Последовательный периферийный интерфейс SPI (Serial Peripheral Interface) — последовательный стандарт передачи данных. Предназначен для сопряжения микроконтроллеров и периферийных устройств. SPI интерфейс иногда называют четырёхпроводным интерфейсом.
Описание работы интерфейса SPI
Принцип работы SPI заключается в следующем. Данные по SPI передаются последовательно, по 1 биту. Получение и отправка данных осуществляется раздельно и не происходит в один момент времени, а осуществляется при помощи синхронизированного сигнала на специальной шине.
Шина по которой передается синхросигнал зовется шиной тактирования, а сама идея разделения заключается в том, что считывание и установка данных осуществляется по противоположным фронтам генерируемых на шине тактирования.
Такое разделение с течением времени получение и отправки данных, дает возможность использовать только один регистр. Та устройство которое управляет шиной синхроимпульсов является главным и называется «Ведущим» или «Мастером» (Master).
Главное устройство или «Master» осуществляет управление процессами передачи данных. Т.е. он определяет когда начать процесс передачи данных когда его нужно завершить и какой объем данных передать. Другие устройства которые подключаются к мастеру, называются ведомыми или «Slave«.
Наименование выводов интерфейса SPI
При двухстороннем обмене его называют полнодуплексный, в интерфейсе SPI задействованы все 4 линии:
Кодировка уровней происходит логическими «1» и «0» на шине данных (MOSI и MISO). Другими словами «1» это высокий уровень напряжения, а «0» соответственно низкий. То как выставляется уровень напряжения на шине не имеет значения, т. е. выводы передатчиков могут быть как с «открытым коллектором» там и «push-pull». Высокий уровень соответствует равен напряжению питания микросхему. Если у нас схема запитана от 5 В то и высокий уровень — 5 В, если 3.3 то соответственно высокий уровень — 3.3 В.
Линия SS необходима для установки начали и конца передачи сигнала. Этот сигнал инверсный, т.е. когда мы передает данные у нас на этой низкий уровень, когда данные не передаются то высокий. По сигналу SS мастеру можно подключаться к разным «слейвам» и использую одни и те же линии данных. Только вот к каждому «слейву» придется тянуть свою линию SS.
Название линий могу отличаться у разных производителей:
MISO: SOMI, SDO (на устройстве), DO, DON, SO, MRSR;
MOSI: SIMO, SDI (на устройстве), DI, DIN, SI, MTST;
SCLK: SCK, CLK, SPC (SPI serial port clock);
SS: nCS, CS, CSB, CSN, NSS, nSS, STE, SYNC.

Количество линий не всегда четыре, иногда их может быть и три. К примеру если передача данных осуществляется в одном направлении или используется только одна двунаправленная шина вместо двух однонаправленных. Если используется одна двунаправленная шина то одновременно передавать и принимать данные по ней не возможно, можно либо отправлять либо принимать.
Прием и передача и данных в интерфейсе SPI
Передача данных в интерфейсе SPI происходит побитно, а по противоположным уровням сигнала тактирования происходи либо установка либо чтение данных. Момент чтение данных называется latch, а момент установки shift.
Данные обычно не передаются по одному биту, обычно их посылают по 8 бит и более. По этой причине на выходе передатчика делают сдвиговый регистр, куда грузится сразу вся пачка передаваемых данных. Значение старшего или младшего бита сдвивого регистра устанавливается на шине данных в зависимости от точно что передаем вперед. А для того чтобы установить на шине последующий передаваемый бит, нужно лишь сдвинуть этот регистр.
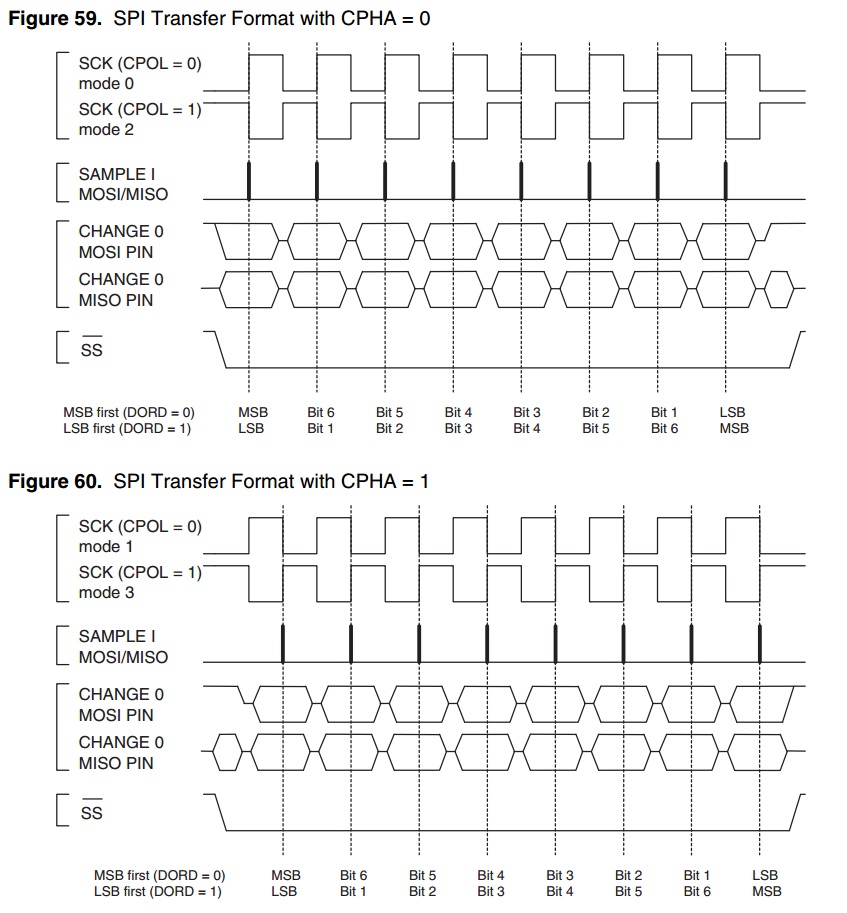
Уровень сигнала в котором находится шина тактирования в неактивном состоянии когда у нас передача данных не происходит, называется полярностью ее обозначают CPOL. Если у нас нет передачи данных то на шине тактирования SCLK логический ноль, т.е. CPOL=0, и наоборот если высокий уровень на шине то CPOL=1.
Последовательность чередования считывания и сдвига называют фазой, обозначается как CPHA. Если по первому фронту на SCLK происходит считывание, то CPHA=0, а если по первому фронту на SCLK происходит сдвиг, то CPHA=1.
Режимы работы интерфейса SPI
Для обозначения режимов работы интерфейса SPI принято следующее соглашение:
Режимы работы SPI демонстрирует картинка ниже.
Важно отметить 1 момент, линия SS это линий которая управляет сеансом обмена, а не только линия для выбора слейва. Поэтому если вы используете только слейв то линию SS подключать нужно подключать.
Данная статья является кратким дискурсом по шине SPI и не должна восприниматься как точная техническая документация. Рассматривается только полнодуплексный вариант применения.
Общие сведения:
Несмотря на то, что интерфейс называется 4-х проводным, для подключения нескольких ведомых понадобится по одному проводу SS для каждого ведомого (в полнодуплексной реализации). Сигналы MISO, MOSI и SCK являются общими для всех устройств на шине. Ведущий посылает сигнал SS для того ведомого, обмен данными с которым будет осуществляться. Простыми словами, все ведомые, кроме выбранного ведущим будут игнорировать данные на шине. SS является инверсным (active-low), что означает что ведущему необходимо прижать эту линию для выбора ведомого.
Подключение:
SPI на Arduino:
Arduino UNO/Piranha UNO/Arduino ULTRA
На Arduino UNO/Piranha UNO/Arduino ULTRA выводы аппаратного SPI расположены на 10, 11, 12 и 13 выводах, а так же эти выводы соединены с колодкой ICSP (in circuit serial programmer):
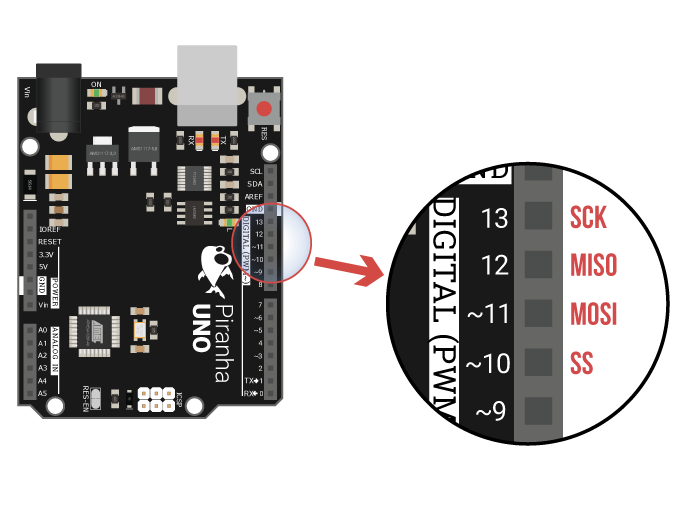
| Сигнал | Вывод |
|---|---|
| SS | 10 |
| MOSI | 11 |
| MISO | 12 |
| SCK | 13 |
Arduino MEGA
На Arduino MEGA выводы аппаратного SPI расположены на 50, 51, 52 и 53 выводах, а так же эти выводы соединены с колодкой ICSP (in circuit serial programmer):
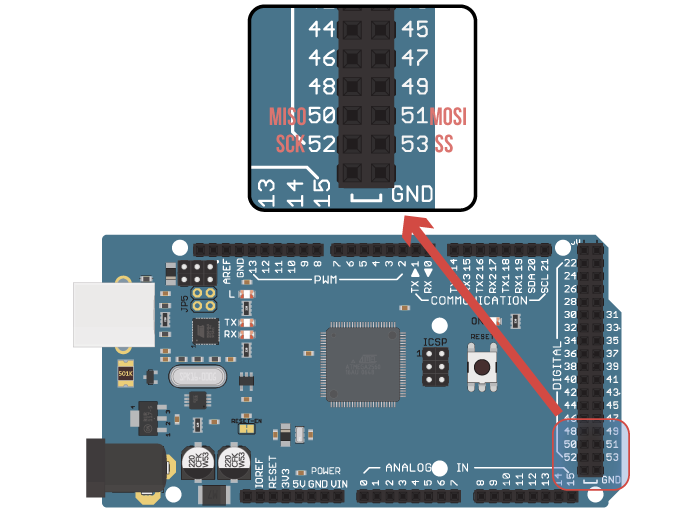
| Сигнал | Вывод |
|---|---|
| SS | 53 |
| MOSI | 51 |
| MISO | 50 |
| SCK | 52 |
Пример для Arduino
В этих примерах мы соединим две Arduino по SPI по следующей схеме:
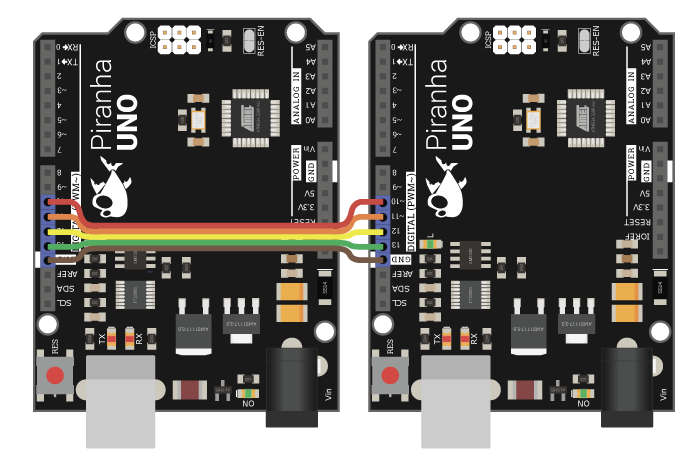
В одну плату необходимо загрузить скетч ведущего, а в другую скетч ведомого. Для проверки работы необходимо открыть проследовательный монитор той платы, в которую загружен скетч ведомого.
Arduino UNO в качестве ведущего:
Arduino UNO в качестве ведомого:
После соединения двух Arduino по SPI и загрузки соответствующих скетчей, мы будем получать следующее сообщение в мониторе последовательного порта ведомого микроконтроллера раз в секунду:
SPI на Raspberry Pi
На Raspberry Pi выводы аппаратного SPI расположены на выводах GPIO7, GPIO8, GPIO9, GPIO10, GPIO11:
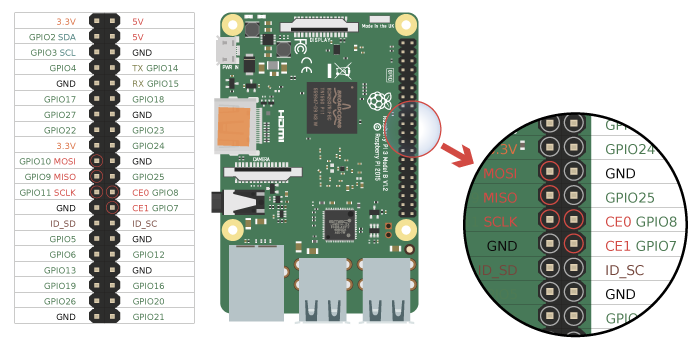
Подробное описание как это сделать можно посмотреть по ссылке Raspberry Pi, включаем I2C, SPI
Пример работы с SPI на Python:
В отличие от Arduino для Raspberry не существует простых решений для работы в режиме ведомого. Подробней ознакомиться с работой чипа BCM Raspberry можно в технической документации на официальном сайте, стр. 160.
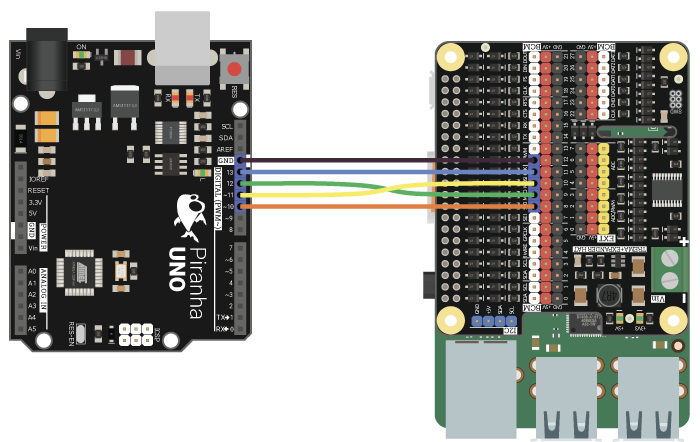
Для проверки работы сценария можно подключить Raspberry по SPI к Arduino со скетчем из примера выше через преобразователь уровней или Trema+Expander Hat:
Подробнее о SPI
Параметры
Существуют четыре режима работы SPI, зависящие от полярности (CPOL) и фазы (CPHA) тактирования:
| Режим | Полярность | Фаза | Фронт тактирования | Фронт установки бита данных |
|---|---|---|---|---|
| SPI_MODE0 | 0 | 0 | Спадающий | Нарастающий |
| SPI_MODE1 | 0 | 1 | Нарастающий | Спадающий |
| SPI_MODE2 | 1 | 0 | Нарастающий | Спадающий |
| SPI_MODE3 | 1 | 1 | Спадающий | Нарастающий |
В Arduino IDE для установки режима необходимо передать функции, возвращающей объект настроек параметр режима работы SPI_MODE, например:
Для выбора режима работы SPI на Raspberry Pi необходимо вызвать дескриптор объекта SpiDev().mode и присвоить ему битовые значения CPOL и CPHA, например:
Скорость передачи данных
Скорость передачи данных устанавливается ведущим и может меняться «на лету». Программист в силах указать лишь максимальную скорость передачи данных.
Использование интерфейса SPI в Arduino – полное руководство
Современные микроконтроллеры используют много различных протоколов для взаимодействия с различными датчиками и периферийными устройствами. Одними из часто используемых протоколов проводной и беспроводной связи являются протоколы последовательной связи (Serial Communication). Последовательная связь – это процесс передачи одного бита за другим с течением времени, последовательно, по каналу связи или шине. Наиболее известными протоколами последовательной связи в настоящее время являются UART, CAN, USB, I2C и SPI.

В этой статье мы рассмотрим протокол (интерфейс) SPI и как его использовать в плате Arduino. Мы будем использовать протокол SPI для связи между двумя платами Arduino. Одна из плат Arduino будет выступать в качестве ведущей (Master), а другая – в качестве ведомой (Slave). К обоим платам Arduino будут кнопки и светодиоды. Чтобы продемонстрировать возможности связи по протоколу SPI между двумя платами Arduino мы будем управлять светодиодом на ведущей стороне при помощи нажатия кнопки на ведомой стороне и наоборот – все это мы будем осуществлять с помощью протокола последовательной связи SPI.
Что такое SPI
SPI расшифровывается как Serial Peripheral Interface и переводится как последовательный интерфейс (периферийных устройств), а по своей сути он является протоколом последовательной связи. Интерфейс SPI был разработан в компании Motorola в 1970 г. Интерфейс SPI имеет полное дуплексное соединение, что означает что данные передаются и принимаются одновременно. То есть ведущий (master) может передавать данные ведомому (slave), а ведомый одновременно с этим может передавать данные ведущему. SPI является протоколом синхронной последовательной связи, то есть ему для работы необходима синхронизация всех устройств. Ранее использование данного интерфейса на нашем сайте мы рассматривали при подключении графического ЖК дисплея Nokia 5110 к плате Arduino.
Принципы работы интерфейса SPI
Для работы по принципу ведущий/ведомый (master/Slave) протокол SPI использует 4 линии (провода). В этом протоколе ведущий всегда один, а ведомых может быть несколько. В качестве ведущего устройства обычно выступает микроконтроллер, а в качестве ведомых устройств могут выступать микроконтроллеры, датчики, АЦП, ЦАП, ЖК дисплеи и т.д.
На следующем рисунке показан принцип работы протокола SPI с одним ведущим (Master) и одним ведомым (Slave).

SPI интерфейс для своей работы использует 4 линии – MISO, MOSI, SS, and CLK. Их назначение следующее:
На следующем рисунке показан принцип работы протокола SPI с одним ведущим (Master) и несколькими ведомыми (Slave).

Чтобы начать связь (взаимодействие) между ведущим и ведомым нам необходимо установить на контакте ведомого Slave Select (SS) напряжение низкого уровня чтобы он мог взаимодействовать с ведущим. Когда на этом контакте напряжение высокого уровня (high) ведомый игнорирует ведущего. Это позволяет иметь множество ведомых устройств, работающих по протоколу SPI, использующих одни и те же (общие) линии MISO, MOSI и CLK ведущего устройства. Как вы можете видеть из представленного рисунка для 4-х ведомых устройств линии SCLK, MISO, MOSI общие для соединения с ведущим, а линии (контакты) SS каждого ведомого устройства подключены к отдельным контактам SS (SS1, SS2, SS3, SS4) ведущего устройства. При помощи установки на требуемом контакте SS напряжения низкого уровня (LOW) ведущий (master) может взаимодействовать с нужным ему ведомым (slave).
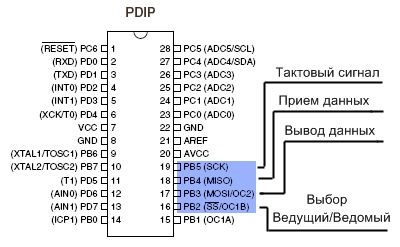
Контакты SPI в плате Arduino Uno
На следующем рисунке красным прямоугольником отмечены контакты, которые могут быть использованы в плате Arduino Uno для связи по протоколу SPI.

| Линия интерфейса SPI | Контакт Arduino Uno |
| MOSI | 11 или ICSP-4 |
| MISO | 12 или ICSP-1 |
| SCK | 13 или ICSP-3 |
| SS | 10 |
С контактами разобрались, двигаемся дальше.
Использование интерфейса SPI в Arduino
Перед тем как начать обмен данными между двумя платами Arduino по протоколу SPI давайте рассмотрим основные принципы работы с библиотекой SPI (SPI library) в Arduino IDE.
1. SPI.begin()
Инициализирует шину SPI при помощи установки режимов работы контактов SCK, MOSI и SS на вывод данных, подачи на контакты SCK и MOSI напряжения низкого уровня (low), а на контакт SS – напряжения высокого уровня (high).
2. SPI.setClockDivider(divider)
Используется для установки делителя (коэффициента деления) для сигнала синхронизации SPI по отношению к тактовой частоте микроконтроллера в плате Arduino. Можно использовать делители 2, 4, 8, 16, 32, 64 или 128.
• SPI_CLOCK_DIV2
• SPI_CLOCK_DIV4
• SPI_CLOCK_DIV8
• SPI_CLOCK_DIV16
• SPI_CLOCK_DIV32
• SPI_CLOCK_DIV64
• SPI_CLOCK_DIV128
3. SPI.attachInterrupt(handler)
Включает режим прерываний в ведомом (slave) устройстве. Прерывание будет возникать каждый раз, когда ведомое устройство будет принимать данные от ведущего (master) устройства.
4. SPI.transfer(val)
Эта функция используется для одновременного приема и передачи данных между ведущим и ведомым.
Необходимые компоненты
Схема проекта
Схема проекта для последовательной связи между двумя платами Arduino по протоколу SPI представлена на следующем рисунке.
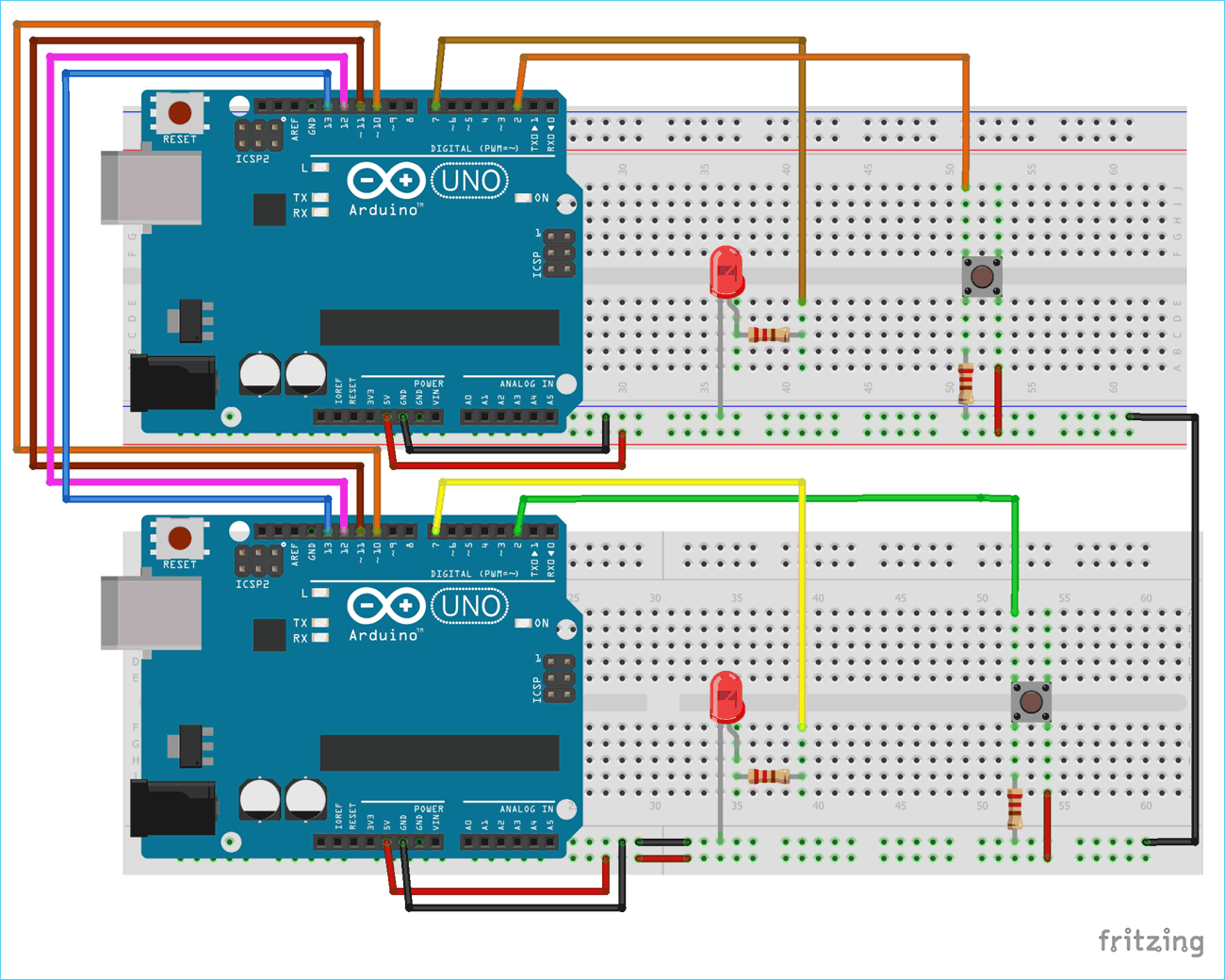 Внешний вид собранной конструкции проекта на макетных платах представлен на следующем рисунке.
Внешний вид собранной конструкции проекта на макетных платах представлен на следующем рисунке.

Объяснение программы для Arduino
Нам будут необходимы две программы: одна – для ведущей платы Arduino, а другая – для ведомой платы Arduino. Коды обоих программ приведены в конце статьи, здесь же мы кратко рассмотрим их основные фрагменты.
Программа для ведущей (Master) платы Arduino
1. Первым делом в программе нам необходимо подключить библиотеку SPI чтобы получить возможность использования функций этого протокола.
Обзор шины SPI и разработка драйвера ведомого SPI устройства для embedded Linux (Часть первая, обзорная)
В этой статье я хочу провести краткий обзор шины SPI (интерфейса, широко распространённого во встраиваемой технике, используемого для подключения различных устройств) и попытаюсь описать процесс создания драйвера протокольного уровня SPI устройства для Linux. Данный документ не претендует на роль полного руководства, а скорее преследует цель указать нужное направление. Так как статья не вошла в размер одного топика, мне пришлось разбить её на две части.
0. Вместо введения
Что это за статья?
Эта статья представляет собой компиляцию информации из различных источников, вольный перевод некоторых частей документации, а также мои собственные комментарии, дополнения и описания возникших проблем.
Первый подраздел описывает работу шины SPI, данная часть статьи конкретно к Linux никак не привязана, поэтому её можно читать тем, кому Linux не интересен, а нужно лишь получить информацию об этом интерфейсе.
Второй подраздел описывает структуры и механизмы лежащие в основе работы с SPI в Linux, его нужно прочесть для понимания того, о чём пойдёт речь в третьей и четвёртой частях.
Если вас не интересует мои переводы и дополнения, можете смело переходить сразу к пятой части, там можно найти информацию о том, где получить всю необходимую информацию по данному вопросу.
Если вы видите ссылки в названии какой-либо структуры или функции, можете открыть её в новой вкладке, так вы сможете попасть непосредственно на описание данной структуры/функции в официальной документации к ядру Linux.
Ошибки
Я не волшебник, я только учусь. Если найдёте какие-либо ошибки или неточности, пожалуйста, сообщите мне.
1. Что такое SPI?
Аббревиатура SPI означает «Serial Peripheral Interface» или в русском варианте «последовательный периферийный интерфейс». Название говорит само за себя, данный интерфейс используется для работы с различными периферийными устройствами. Например, это могут быть различные ЦАП/АЦП, потенциометры, датчики, расширители портов ввода/вывода (GPIO), различная память и даже более сложная периферия, такая как звуковые кодеки и контроллеры Ethernet.
С технической точки зрения SPI — это синхронная четырёхпроводная шина. Она представляет собой соединение двух синхронных сдвиговых регистров, которые является центральным элементом любого SPI устройства. Для соединения используется конфигурацию ведущий/ведомый. Только ведущий может генерировать импульсы синхронизации. В схеме всегда только один ведущий (в отличие от той же шины I2C, где возможен вариант с более чем одним ведущим), количество ведомых может быть различно. В общем случае выход ведущего соединяется со входом ведомого, и наоборот, выход ведомого соединяется со входом ведущего. При подаче импульсов синхронизации на выход SCK, данные выталкиваются ведущим с выхода MOSI, и захватываются ведомым по входу MISO. Таким образом если подать количество импульсов синхронизации соответствующее разрядности сдвигового регистра, то данные в регистрах обменяются местами. Отсюда следует что SPI всегда работает в полнодуплексном режиме. А вот нужны ли нам данные, полученные от устройства при записи какого-либо параметра, это уже другой вопрос. Часто бывает что данные полученные от устройства при записи в него данных являются мусором, в таком случае их просто игнорируют, но мы их получим вне зависимости от нашего желания.
Контроллер SPI, как правило, реализуется периферийным блоком в MCU или eMPU. В большинстве чипов он может работать как в режиме ведущего, так и в режиме ведомого. Но на данный момент Linux поддерживает только режим ведущего (Master).
Существует несколько способов включения SPI устройств.

Простейший из них вы видите на рисунке выше (спасибо Wikipedia за рисунки под свободной лицензией GFDL). В данном случае к ведущему все ведомые подключаются параллельно, за исключением сигнала выбора ведомого (
CS). Для каждого ведомого необходим отдельный сигнал выбора ведомого (на рисунке они обозначены как SSx). Для сигналов выбора ведомого могут использоваться как специально предназначенные для этого выходы SPI-контроллера, так и порты ввода/вывода общего назначения (GPIO) микроконтроллера.
CS — Chip Select (выбор микросхемы). С помощью данного сигнала происходит активация ведомого устройства. Обычно он является инверсным, то есть низкий уровень считается активным. Иногда его называют
SS (Slave Select, рус. «выбор ведомого»).
Частным случаем независимого подключения является вариант с одним единственным ведомым. В таком случае может возникнуть желание подтянуть сигнал
CS к земле, чтобы устройство всегда было в активном состоянии. Но делать это крайне не рекомендуется, так как ведомое устройство может использовать сигнал CS для инициализации или для других служебных целей.
Основное неудобство при независимом подключении ведомых в том, что для каждого из ведомых необходим отдельный сигнал
CS. Каскадная схема подключения, в зарубежной литературе называемая «daisy-chain» (можно перевести как «гирлянда»), лишена такого недостатка.
Как видно из рисунка выше, здесь используется общий сигнал выбора ведомого для всех ведомых. Выход каждого из ведомых соединяется со входом следующего. Выход последнего ведомого соединяется со входом ведущего, таким образом образуется замкнутая цепь. При таком подключении можно считать что последовательно соединённые устройства образуют один большой сдвиговый регистр. Соответственно, данные можно записать во все устройства «за один присест», предварительно собрав нужный пакет, объединяющий данные для каждого из устройств в порядке соответствующем физическому порядку соединения. Но тут есть один тонкий момент. Во-первых, все микросхемы должны поддерживать такой тип подключения; во-вторых, ядро Linux не поддерживает такой тип подключения, так что если всё же захотите его использовать, то вам придётся модифицировать существующие драйвера, либо же написать собственные.
CS и MISO не показаны. Но в данном случае они не так интересны, например, сигнал
CS представляет собой просто «провал» на всём протяжении передачи данных.
2. Обзор SPI подсистемы в Linux
Драйверы SPI в Linux делятся на две части. Первая — это драйверы SPI контроллеров, которые работают непосредственно с железом конкретно взятого контроллера. Такие драйверы определяют как настроить контроллер, какие действия предпринять при переходе в режим пониженного энергопотребления (suspend) и выходе из него(resume), выбор следующей передачи (spi_transfer) из очереди передач в сообщении (spi_message, об очередях чуть ниже) и отправка его непосредственно в порт, также определяется как активировать/деактивировать конкретное устройство посредством CS (функции cs_activate/cs_deactivate). В этой статье я не буду описывать данный тип драйверов. Как правило, они уже реализованы для тех MCU/eMPU на которые существует порт Linux, и лезть в них руками надо только в том случае, если вам нужна какая-то специфичная функция, вроде Chip Select Decoding, для возможности активации нужного ведомого устройства посредством внешней логики. Иногда это бывает полезно, например, в случае недостатка GPIO.
Вторая часть — это протокольные драйверы, используемые для работы с различными ведомыми устройствами, которые подключены к шине SPI. Данные драйверы называют «протокольными», потому что они лишь отправляют и получают различные данные от ведомых устройств, при этом не работая напрямую с каким-либо оборудованием. Именно данный тип драйверов нам наиболее интересен, так как позволяет добавить поддержку интересующего ведомого устройства в систему, его то мы и рассмотрим.
Большинство протокольных драйверов представляет собой модули ядра. Например, если устройство представляет собой аудиокодек подключаемый по SPI, то драйвер будет также использовать функции предоставляемые ALSA, а программы (например, madplay) смогут работать с ним посредством символьного устройства /dev/audio, не имея ни малейшего понятия о том как он аппаратно устроен и к какой шине подключен.
Также ядро предоставляет протокольный драйвер общего назначения, называемый spidev, с интерфейсом в виде символьного устройства. Он позволяет совершать полудуплексные обращения к ведомому SPI-устройству посредством стандартных системных вызовов read() и write(), устанавливать режим работы, а также производить полнодуплексный обмен данными посредством ioctl() вызовов.
transfers — связанный список передаваемых сегментов в транзакции (передач);
spi — указатель на spi устройство, в очереди которого стоит данное сообщение;
is_dma_maped — если данный флаг «истина», то предоставлены оба, dma и cpu виртуальные адреса для каждого буфера передачи;
complete — обратный вызов, вызываемый для извещения об окончании транзакции;
context — аргумент для обратного вызова complete();
actual_length — полное число байт, которые были переданы во всех успешных предачах;
status — 0 в случае успеха, либо отрицательное значение с errno в случае ошибки;
Структура spi_message используется для выполнения атомарной последовательности передач данных, каждая из которых представлена структурой spi_transfer. Последовательность передач «атомарна» в том смысле, что шина SPI не может быть использована для передачи другого сообщения spi_message до тех пор, пока не будет полностью отправлено предыдущее. На некоторых системах, многие такие последовательности могут быть выполнены как единая запрограммированная DMA передача. На всех системах данные сообщения ставятся в очередь, и могут быть завершены уже после транзакций с другими устройствами. Все обращения к отдельно взятому ведомому устройству всегда выполняются в FIFO порядке.
Структура struct spi_transfer описывает отдельную передачу в связанном списке сообщения и определяет пару буферов для чтения/записи.
tx_buf — указатель на буфер данных в пространстве памяти ядра, которые необходимо передать, либо NULL;
rx_buf — указатель на буфер данных в пространстве памяти ядра, в который данные следует считать, либо NULL;
len — размер буферов rx и tx в байтах;
tx_dma — DMA адрес tx_buf, используется если установлен параметр spi_message.is_dma_mapped;
rx_dma — DMA адрес rx_buf, используется если установлен параметр spi_message.is_dma_mapped;
speed_hz — устанавливает скорость для передачи, отличную от установленной по-умолчанию для устройства. Если данное значение равно 0, то используется скорость по-умолчанию, указанная в поле max_speed_hz структуры spi_device.
bits_per_word — устанавливает количество бит на слово, отличное от определённого по умолчанию. Если данное значение равно 0, то используется значенние по-умолчанию, указанное в поле bits_per_word структуры spi_device.
delay_usecs — время ожидания в микросекундах, после того как был отправлен последний бит передачи и перед тем как сменить состояние chipselect’а, либо начать передачу следующей передачи в очереди. Будьте крайне осторожны с данным параметром, нужно смотреть в какой части драйвера контроллера реализуется задержка. Например, для чипов серии at91 она реализована в обработчике прерывания, так что её использование чревато последствиями.
При инициализации структуры spi_transfer существует очень важный момент, они обязательно должны быть выделены в области памяти доступной для DMA через kmalloc, kzalloc и иже с ними. Если master-драйер использует dma, то при использовании статически объявленных массивов драйвер будет падать при попытке передачи.
При передаче данных по SPI количество записанных бит всегда равно количеству считанных. Протокольные драйверы всегда должны предоставлять указатели на буферы tx_buf и/или rx_buf. В некоторых случаях они могут предоставлять DMA адреса для передаваемых данных.
Возможность переопределения скорости передачи данных и количества бит на слово для каждой передачи в отдельности зависит от конкретной реализации драйвера и аппаратных возможностей контроллера. Например, для контроллера SPI в чипах серии at91 возможность переопределения полей speed_hz и bits_per_word не предусмотрена, поэтому они должны быть всегда установлены в 0, иначе вы получите ошибку при попытке передачи данных.
Если указатель на tx_buf установлен как NULL, то SPI контроллер будет выталкивать нули при заполнении буфера rx_buf. В случае, когда rx_buf установлен в NULL, считываемые данные будут игнорироваться. Количество выталкиваемых (и захватываемых) байтов всегда равно len. Попытка вытолкнуть только часть слова приведёт к ошибке. (Например, при попытке выталкивании трёх байт и длине слова 16 бит или 20 бит, в первом случае будет использовано 2 байта на слово, во втором — 4 байта).
Данные для передачи всегда хранятся в порядке специфичном для данной аппаратной платформы. При отправке/считывании данных происходит автоматическое конвертирование порядка байт из специфичного для SPI (обычно big-endian, за исключением случая когда выставлен параметр SPI_LSB_FIRST) в аппаратно-специфичный порядок для данного CPU. Например, если параметр bits_per_word равен 16, то буферы будут занимать по 2N байт, и содержать по N слов с длиной 16 бит каждое, хранящемся в байтовом порядке, специфичным для данного CPU.
В том случае, если размер слова не является степенью двойки, то представление слова в памяти включает дополнительные биты. Слова, хранящиеся в памяти для протокольного драйвера всегда являются выровненными по правому краю (right-justified), так что дополнительные биты всегда будут являться старшими разрядами.
Для наглядности снова приведу осциллограмму:
В данном случае tx-буфер содержит значение 0xf98e, установленное значение bits_per_word соответствует 12 битам на слово. Устройство работает в SPI_MODE_0. На рисунке синяя линия соответствует выходу MOSI контроллера, а жёлтая — SCK. Здесь хорошо видно что при отправке пришло только 0x098e, старшие четыре бита были отброшены, так как они считаются дополнительными. Если совсем просто, то одно 12-битное слово занимает в памяти два байта, а разница между размером слова в памяти и его действительным размером составляет 2*8 — 12 = 4 бита, которые отбрасываются при передаче.
SPI не поддерживает какого-либо механизма автоматического обнаружения устройств. К тому же, в большинстве случаев, SPI устройства не предусматривают горячее подключение/отключение, поэтому они, как правило, просто распаиваются непосредственно на плате. В связи с этим данные устройства считаются специфичными для конкретной платы (board-specific). Параметры для таких устройств указываются в файле платы: arch/. /mach-*/board-*.c.
Например, вот так будет выглядеть установка параметров для аудиокодека tlv320aic23b для отладочной платы SK-AT91SAM9260:
где modalias – название драйвера ядра, отвечающего за обслуживание устройства (в нашем случае “tlv320aic23b”);
chip_select – номер соответсвующего chip select’а;
max_speed_hz – максимальная частота в Гц;
mode – режим SPI, определяемый константами SPI_MODE_0… SPI_MODE_3, также через операцию битового “или” могут быть добавлены флаги SPI_CS_HIGH (устанавливает активным высокий уровень для chipselect-а ), SPI_NO_CS (передача данных без активации CS в принципе). Полный список возможных флагов можно посмотреть в описании структуры spi_device;
bus_num – номер шины (как правило, соответсвует номеру SPI контроллера в даташите на MCU/eMPU).
Также структура spi_board_info содержит следующие поля, не инициализированные в примере выше:
const void *platform_data – данное поле предназначено для хранения указателя на данные специфичные для конкретного драйвера;
void *controller_data – для некоторых контроллеров необходима информация о настройке устройства, например, DMA;
int irq – зависит от подключения устройства.
Все поля структуры spi_board_info устанавливают соответствующие поля структуры spi_device.
В случае необходимости установки параметров для других SPI устройств, в масив добавляются ещё аналогичые элементы.
Данные структуры хранят информацию, которая не может быть всегда определена драйверами. Информация, которая может быть определена функцией probe() драйвера (например, количество бит на слово), в данную структуру не включается.
Стоит заметить, что всё же существует возможность горячего подключения ведомых SPI устройств. В этом случае используют функцию spi_busnum_to_master() для получения указателя на структуру spi_master по номеру шины SPI и дальнейшего перебора устройств на шине. Но данная тема выходит за рамки данной статьи.



